


- Thursday 24 May 2018 - 12:51:00

حمل و نقل شهری با قایقهای هوشمند خودران
عصر خودرو -پژوهشگران دانشگاه امآیتی و موسسه آمستردام، برای رفع مشکل ترافیک، قایقهای هوشمند خودران ابداع کردهاند.


به گزارش پایگاه خبری«عصرخودرو» به نقل از ایسنا ، ترافیک، یکی از خستهکنندهترین مشکلات زندگی شهری است. با این که برخی شرکتها وعده دادهاند در آینده تردد با تاکسیهای پرنده ممکن خواهد شد، شهرهایی مانند آمستردام، به فکر جایگزینهای بهتری هستند.
برنامه پروژه "روبوت" (RoBoat)، استفاده از قایقهای خودران در کانالهای آبی برای رساندن مسافران و خدمه به مقصد، ملحق کردن قایقها به یکدیگر برای تشکیل ساختارهای شناور موقت و بررسی محیط است. این برنامه طوری طراحی شده که قایقها، هوشمندتر و چابکتر شده و ساخت آنها سادهتر باشد.
اجرای این پروژه، با همکاری دانشگاه "امآیتی" (MIT) و "موسسه آمستردام" صورت میگیرد.
هدف از انجام پروژه روبوت، استفاده از قایقهای خودکار به جای تاکسی، وانت و کامیونهای حمل زباله است تا ازدحام خیابانهای شلوغ، کاهش یابد. حتی، انجام بعضی از این خدمات شهری در شب میتواند به پاکسازی بیشتر جادهها کمک کند.
"دنیل راس" (Daniela Rus)، از نویسندگان این پژوهش میگوید: تصور کنید همه این خدمات زیرساختی که معمولا در طول روز صورت میگیرند، در نیمه شب و روی آب به کار روند.
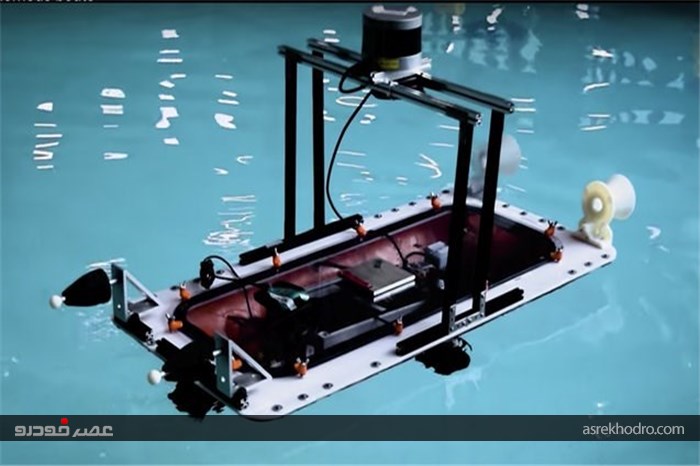
پژوهشگران این پروژه، قایقهای هوشمند کوچکی را ابداع کردهاند که به تعدای حسگر و لوازم الکتریکی مجهز هستند. آنها به این قایقها، توانایی محلق شدن به یکدیگر را دادهاند تا ساختارهای شناور موقتی مانند پلها یا حتی پلتفرمهایی برای کنسرتها و فروشگاهها بسازند. نخستین نمونه این قایقها در سال 2016 ارائه و به مسیری در کانال آمستردام فرستاده شد.
اکنون، این گروه پژوهشی، طراحی قایق ها را بهبود بخشیده و ساخت قایقها با استفاده از چاپ سهبعدی بدنه کشتی، سادهتر شده است. این کار، با استفاده از چاپگر تجاری، 60 ساعت زمان برد. این چاپگر، 16 قطعه تولید کرد که پس از تولید، به یکدیگر ملحق و با چندین لایه پشمشیشه مهر و موم شدند تا بدنه قایق را شکل دهند.
هرکدام از قایقها، حامل یک منبع انرژی، آنتن وایفای، "سیستم تعیین موقعیت" (GPS)، یک "واحد اندازهگیری درونی" (IMU)، یک رایانهٔ کوچک و یک ریزکنترلگر هستند. واحدهای سیستم تعیین موقعیت میتوانند موقعیت بیرونی را مشخص کنند و ردیابی داخلی هم با استفاده از سیستم بیسیم مافوق صدا انجام میشود.
پژوهشگران برای چابکی قایقها، پرههایی در مرکز هر چهار گوشه آنها گذاشتند. این کار، امکان حرکت آسان به جلو و عقب را فراهم میکند. نکته دیگر در ساخت این قایقها، الگوریتم راندن آنهاست که برای استفاده از عواملی مانند نیروی گریز از مرکز، کشش و تغییر جرم طراحی شده است.
"وی وانگ" (Wei Wang)، نویسنده ارشد این پژوهش میگوید: کنترلکننده، پویایی قایق، موقعیت کنونی آن، محدودیتهای رانندگی و موقعیت مقصد را برای چند ثانیه بعد در نظر میگیرد تا راندن قایق را در مسیر مورد نظر بهبود بخشد.
پژوهشگران، برای اطمینان از عملکرد الگوریتم های جدید کنترل، نخستین نمونه قایق را در مسیرهای مشخص، آزمایش کردند. پس از انجام 10 آزمایش، اشتباهات ردیابی قایق از آنچه انتظار میرفت، کمتر شد.
بررسیهای آینده این قایقها، در مواجهه با امواج، جریان آب و تعداد بسیاری از مسافران و خدمه انجام خواهند شد.
مقاله این پژوهش، این هفته در کنفرانس بینالمللی " IEEE" ارائه میشود.
- حمل و نقل درون شهری
افزایش گواهی اسقاط خودروهای بار درون شهری
اعلام نرخ نهایی سرویس مدارس
ورود تاکسی ونهای جدید با سقف بلند به ناوگان تهران
پاریس برای حمل و نقل شهری به تلهکابین مجهز میشود
کمبود نیروی سازمان اتوبوسرانی و کاهش تعداد اتوبوسها
عضو شورای شهر تهران فروش صندلی اتوبوس در پایتخت را تکذیب کرد
کرایه اتوبوسهای جدید DRT در پایتخت چقدر است؟
ایرتاکسی راهاندازی میشود
توزیع کارت بلیت اعتباری خبرنگاران آغاز شد
100 دستگاه اتوبوس تا پایان سال وارد ناوگان حملونقل عمومی میشود
تخصیص سهمیه سوخت عملکردی به ناوگان حمل باردرون شهری براساس باربرگ
سهم جابجایی مسافران با مترو و اتوبوس باید به 50 درصد برسد
هفت هزار دستگاه اتوبوس درون شهری خریداری یا بازسازی می شود
3 راهکار جدید برای حل مشکل "تاکسیهای فرسوده"
شرط افزایش سن فرسودگی تاکسی ها
ثبت بیش از 14 میلیون سفر در متروی تهران در هفته اول مهرماه
چهارعامل تاثیرگذار بر روند آلودگی هوا
تغییر در برنامه حرکت قطارهای خط 5 متروی تهران و حومه در روز جمعه
روزانه یک میلیون سفر درون شهری در قزوین انجام می شود
فرسودگی بیش از 70درصد ناوگان اتوبوسرانی تا پایان 1400
از طرح ترافیک آژانسها چه خبر؟
واگذاری 5000 تاکسی به فرزندان ایثارگر در انتظار اعلام بنیاد شهید
تاکید نمایندگان و اعضای شورای شهر تهران بر لزوم تقویت حمل و نقل شهری
روایت حملونقل در ایران؛ از چاپار تا تاکسی اینترنتی
ناوگان عمومی با یک میلیون صندلی مسافران نوروزی را جابجا می کند
5500 میلیارد تومان سال آینده به حمل و نقل عمومی کشور اختصاص می یابد
منوی شهرداری برای استارتآپها
راهکار پیشگیری از بحران شدید ترافیک
تقویت ناوگان حمل ونقل عمومی در نقاط پرمسافر جنوب تهران
پانزدهمین نمایشگاه بینالمللی حمل و نقل تهران افتتاح شد
تاکسیهای خودران تسلا در دبی
ناوگان فرسوده حمل و نقل روستایی گلستان نوسازی می شود
قیمت بلیت اتوبوس ویژه ایام نوروز
ورود اتوبوسهای روز گردشگری جهان به ایران
اجرای طرح نوسازی ناوگان تاکسیرانی در کشور
نرم افزارهای موبایلی و مسافرکشهای شهری عامل ترافیک
تغییر مسیرهای خطوط اتوبوسرانی منتهی به محل حادثه "پلاسکو"
اجرایی شدن سامانه هوشمند جاده ای راهکاری موثر در مدیریت حمل و نقل
اختصاص 50 میلیارد تومانی اعتبار به متروی هشتگرد
حل مشکل تردد شهرهای اقماری مشکل ترافیک پایتخت را حل می کند
بهبود سامانه حمل و نقل عمومی اصفهان
بازنگری در مسیر خطوط حمل ونقل عمومی پایتخت
خودروهای جدید تا 2 ماه دیگر به مالکین تاکسی فرسوده تحویل می شود
نظارت بر پارکینگهای عمومی شهر اراک افزایش مییابد
حمل و نقل درون شهری یکی از شاخصهای توسعه است
اولین خودرو پرنده در بازار
اتصال خط 3 و 1 از ایستگاه نوبنیاد به تجریش در آیندهای نزدیک
مخالفت مجدد فرمانداری تهران با افزایش نرخ کرایه تاکسی، اتوبوس و مترو
جابجایی خط اتوبوسرانی رسالت- ونک
بازنگری طرح جامع ترافیک روی میز کمیسیون حمل و نقل شورای شهر
مترو شهر آفتاب تا دو هفته دیگر به بهره برداری میرسد
نرخ خدمات حمل و نقل درون شهری مشهد افزایش یافت
افزایش 30 درصدی کرایه تاکسیها سال 95 در رشت
تاکسیهای جدید سال آینده به ناوگان حمل و نقل شهری زنجان افزوده میشود
تمهیدات اتوبوسرانی برای پنجشنبه آخر سال
نصب تابلوهای نشاندهنده موقعیت مکانی در بزرگراه های تهران
تجهیز تاکسیهای پایتخت به دستگاههای کارتخوان در مراحل پایانی
تجمع تاکسیرانان در اعتراض نسبت به عدم پرداخت سهم حق بیمه
نرخ واقعی کرایه اتوبوسها 3 تا 4 هزار تومان است
کمبود 350 دستگاه اتوبوس شهری در کلانشهر اهواز
کپسول گاز مانعی برای ارائه خدمات تاکسی به معلولین با ویلچر است
بانک خصوصی بخش حمل و نقل تأسیس شود
توسعه حملونقل عمومی در سال 95
5300 تاکسی پیکان فرسوده در شهر تهران تردد میکنند
بازنشسته شدن ناوگان حمل و نقل عمومی پایتخت
کمبود 2500 دستگاه اتوبوس در ناوگان اتوبوسرانی پایتخت
بلاتکلیفی 17 هزار تاکسی فرسوده بواسطه اختلاف ستاد سوخت و ایرانخودرو
تاکید بر ضرورت استفاده از کارت پارک در معابر تعیین شده شهر تبریز
جولان خودروهای تاریخ مصرف گذشته در پایتخت
نصب زمان سنج در ایستگاههای اتوبوس پایتخت
چاره اندیشی شورا برای حل مشکلات رانندگان تاکسی
احتمال تغییر نرخ اتومبیلهای کرایهای
فعالیت 279 اتوبوس برای جابهجایی مسافران درونشهری در ارومیه
پای دستفروشان به اتوبوسهای شهری رسید
خروج 1000 دستگاه اتوبوس فرسوده از سیستم اتوبوسرانی
ماجرای مرخصیهای 5 هزار تومانی در پایتخت
تمهیدات دانشگاه علامه برای تسهیل تردد دانشجویان
گاز سوخت اول امارات در حمل و نقل و زیرساختها میشود
خارج کردن تاکسیهای فرسوده در کرج در دستور کار است
آغاز طرح کنترل و نظارت بر تاکسیهای شهر همدان
توسعه حمل و نقل شهری رشت هزینهبر است
راهاندازی ناوگان تاکسی زائر برای ارائه خدمات به مسافران
خدمترسانی شرکت واحد اتوبوسرانی در ایام برگزاری نمایشگاه مطبوعات
خط فرامنطقهای صادقیه-هفت تیر بدون هیچ تغییری احداث میشود
عدم هماهنگی، طرح LEZ را به اجرا نرساند
توزیع 800 هزار بلیط الکترونیکی در شهر همدان
60 دستگاه از اتوبوسهای همدان بازسازی شد
-
بهرهبرداری از 100 دستگاه اتوبوس حمل و نقل شهری در اصفهان
صدور کارت شناسایی برای رانندگان تاکسی در ساری
خطوط ویژه تاکسی و اتوبوس در اراک راهاندازی میشود
تاکسیرانی بروجرد با مسافرکش های شخصی برخورد می کند
اقدام جالب تاکسیهای بیسیم یاسوج
شغل من «جاماندهبر» است!
چالشها و ارائه راهکارهای حمل ونقل عمومی بانه بررسی شد
جابهجایی ترمینال مرکزی اتوبوسرانی شهر بوشهر
نرخ کرایه اتوبوس درون شهری قزوین 20 درصد افزایش یافت
تحویل کیف پر از پول و طلای یک پیرزن توسط راننده تاکسی
تبریز میزبان بیست و هشتمین مجمع تاکسیرانان شهری کشور
استفاده یکپارچه کارت بلیت بانک شهر در سیستم حمل و نقل عمومی شیراز
اتوبوسهای برقی تهران به زودی راه اندازی می شود
ارتقاء خدمات حمل و نقل در اولویت شورای شهر شهریار
خروج 6 هزار و 200 دستگاه پیکان تاکسی از شهر تهران
ممنوعیت استفاده از تلفن همراه در تاکسی
آغاز صدورکارت هوشمند رانندگان تاکسی و حمل و نقل باری در قزوین
تجهیز نیمی از ناوگان اتوبوسرانی یزد به کولر آبی!!
برگزاری 8 مناقصه ناموفق برای خرید فیلترهای جذب دوده اتوبوسهای شهری
بلاتکلیفی نرخ کرایههای تاکسی در دماوند
حذف بلیط کاغذی تا پایان سال
غیبت دولت در حمایت از حمل و نقل عمومی
ناوگان اتوبوسرانی تهران در شرایط اضطراری اداره میشود
سهم تهرانیها از اتوبوس یک سوم استاندارد جهانی است
ناوگان اتوبوسرانی شهرضا آماده خدمترسانی در عید فطر است
مسیرهای ناوگان اتوبوسرانی اصفهان در روز عید فطر اعلام شد
اختصاص 450 تاکسی برای جا به جایی نمازگزاران عید فطر
جابه جایی نمازگزاران زنجانی با 100 دستگاه اتوبوس در عید فطر
فعالیت مترو و اتوبوسرانی از ساعت5:30 روز عیدفطر
ساماندهی مسیر تاکسی ها در میدان ونک
پیگیری تداوم روند نوسازی ناوگان تاکسیرانی اصفهان
1000 خودرو هیبریدی به ناوگان تاکسیرانی کشور اضافه می شود
20 درصد ناوگان تاکسی کرمان نیازمند نوسازی است
افزایش کرایه تاکسی ها در بجنورد اجرایی شد
اجرای طرح نصب تابلوهای جدید اطلاعرسانی در 4 هزار ایستگاه اتوبوس
تامین 17 هزار خودرو ناوگان حمل و نقل درون شهری از محل کمکهای وزارت نفت
تاکسیهای شهری مشهد به سامانه GPS متصل میشوند
نوسازی ناوگان اتوبوسرانی ارومیه نیازمند کار جهادی است
تشدید فعالیت اکیپ های بازرسی تاکسیرانی همدان در شهر
نرخ کرایه تاکسی در قزوین افزایش می یابد
ناوگان اتوبوسرانی دزفول نوسازی میشود
تجهیز 4 هزار تاکسی در شیراز به دستگاه کارتخوان
تاکسیهای خطی و گردشی برچسب جدید کرایه دریافت کردند
اتمام تست مخازن CNG اتوبوسهای شرکت واحد
زمان اجرای نرخ جدید کرایه تاکسیها دیر اعلام شد
2500 دستگاه تاکسی پلاکاروند به ناوگان تاکسیرانی اهواز جذب میشود
نداشتن پول خرد چقدر به مسافران تاکسی در تهران ضرر می زند؟
کوتاهی تاکسیرانی در نصب برچسب نرخ کرایه تاکسی در برخی خودروها
زمزمه افزایش کرایه تاکسی و اتوبوس در تبریز
50 دستگاه اتوبوس به ناوگان اتوبوسرانی اصفهان افزوده میشود
تمهیدات اتوبوسرانی برای روز ارتش
طرح جامع حملونقل در زنجان بررسی میشود


Controversial Vehicle Price Surge in Iran
IKCO management handed over to consortium of non-governmental shareholders
Iran's government approved car import after four years
$2 Billion Aid Package to Bolster Automotive Industry
Renault sales decline 6.7% in first half of 2019
FIAT cars will be manufactured in Salafchegan, Iran
Car, mobile price fluctuations in Iran puzzling people
IKCO, Azad University Sign R&D Agreement
When will Azerbaijan start producing Peugeot 207?
Iran Annual Auto Output Report: 2018-19
Automotive Industry has exceeded the targets with “Automechanika Istanbul” which the World's 3rd Largest Fair!
Sout Korea’s auto exports down 1.6% in Feb.
Renault to Return to Iran: Deputy Minister
Chery's luxury brand will soon be on the market
Warm start for arrizo6 in Ahwaz


