


- Monday 22 August 2016 - 10:23:00

خودروهای هوشمند و خودران چگونه هدایت میشوند؟
عصر خودرو- هوش مصنوعی که در رابطه با هدایت خودروهای خودران به کار میرود هنوز به طور کامل به ثبات نرسیده است و هنوز نیاز به آزمایش و بهبود دارد. برای رسیدن به حد معینی از توانایی در نرمافزارهای هدایت خودروهای خودران نیاز به الزامات معینی است.
به گزارش پایگاه خبری «عصرخودرو» به نقل از بازار خبر، هوش مصنوعی که در رابطه با هدایت خودروهای خودران به کار میرود هنوز به طور کامل به ثبات نرسیده است و هنوز نیاز به آزمایش و بهبود دارد. برای رسیدن به حد معینی از توانایی در نرمافزارهای هدایت خودروهای خودران نیاز به الزامات معینی است. در این گزارش به بررسی برخی جوانب هدایت این خودروها میپردازیم.
در ماه فوریهی امسال، بیانیهای از سوی سازمان ملی امنیت ترافیک بزرگراههای امریکا (NHTSA) توجهها را به خود جلب کرد. تنظیمکنندهی فدرال امنیت جادههای آمریکا، به کمپانی گوگل اعلام کرده بود که نرم افزار هوش مصنوعی (AI) مورد استفاده توسط این کمپانی در کنترل خودروهای خودران، از این پس میتواند به صورت موثر و کارآمد در برخی از اهداف تنظیمسازی جادهها (و نه در همهی آنها) به عنوان یک راننده قلمداد شود.
نامهی NHTSA در پاسخ به درخواست شرکت گوگل مبنی بر سوال این کمپانی در خصوص شرح تفسیر سازمان استانداردهای وسایل نقلیهی فدرال نوشتهی شده بود. البته رسانهها با پخش این خبر، آن را به منزلهی پذیرفته شدن نرم افزار هوش مصنوعی گوگل از سوی سازمانهای فدرال به عنوان رانندهی سیستم خودران (SDS) قلمداد کردند. اما جزییات این نامه بر خلاف برداشت رسانهها دارای پیام متفاوتی است.

در وهلهی نخست باید اشاره کنیم که نامه از تعبیر «امکان و احتمال استفاده» از این نرم افزار به صورت کاملا همارز با رانندهی انسانی استفاده کرده بود و این به آن معنی است که مفهوم عبارت هنوز به صورت قطعی پذیرفته نشده است. همچنین نامهی NHTSA اشاره داشت که نیاز است تا آزمایشهای مناسب و کافی انجام شوند تا از سازگاری کامل SDS با ملزومات امنیتی جادهها اطمینان حاصل شود.
به عبارتی چالش اصلی در همین موضوع اخیر مطرح است. پرسش این است که اساسا چه رهیافتی میتواند به صورت کامل سازگاری این سیستم خودران را مورد تصدیق قرار دهد؟ آیا نیاز است که سیستم خودران با هوش مصنوعی، پیش از اینکه به طور گسترده روی وسایل نقیله خودران و قبل از آنکه به عنوان یک راننده از نظر قانونی شناخته شود، یک دورهی آزمایشی را طی کند؟ انجام این آزمایشها و محتوای این آزمایشها را چه کسی باید تعیین کند؟
رانندگی در آینده
البته بهتر است دچار اشتباه نشویم. واقعیت این است که خودروسازان و کمپانیهای فناوری در حال کار و پژوهش برای رسیدن به ایدهی آرمانی خودروهای تمام خودکار هستند و این ایده در بخشی از مسیرش به ناچار قرار است که رانندههای انسانی را در حلقهی کنترل خودرو خارج سازد. آنها هم اکنون نیز به پیشرفتهای زیادی در این زمینه دست یافتهاند.
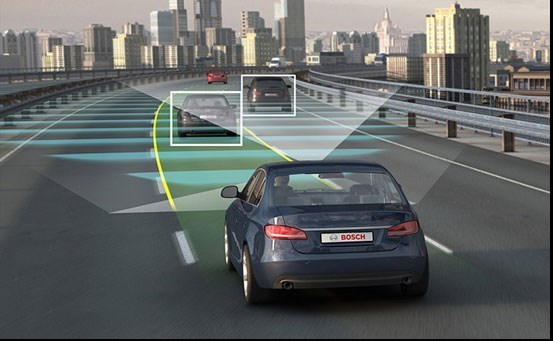
نرم افزار خودروی خودران بر پایهی شبکههای عصبی عمیق گسترش یافته است و شامل میلیونها نورون مجازی است و از رفتار و کارکرد مغز تقلید میکند. کامپیوترهای مرکزی دارای توان محاسباتی بسیار عظیمی هستند و در فضای نسبتا کوچکی به اندازهی یک جعبه جاگذاری شدهاند.
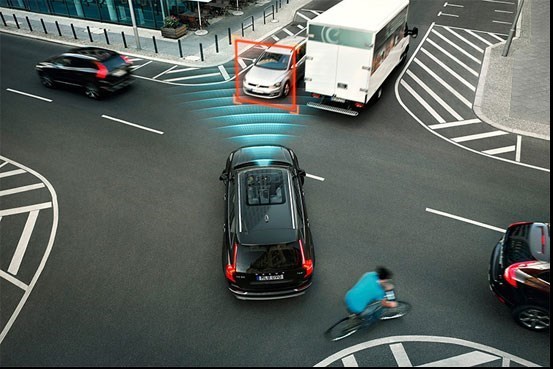
شبکههای عصبی برای آشکارسازی اشیای دنیای واقعی از هیچ برنامهنویسی آشکاری استفاده نمیکنند. در عوض، آنها به گونهای برنامهریزی میشوند که اشیای پیرامون را با استفاده از میلیونها تصویر و مثال از مجموعهی دیتاهای گوناگون مربوط به رانندگی در دنیایی واقعی و رانندگی واقعی، شناسایی و طبقهبندی کنند.
اما خودِ مقولهی رانندگی، نسبت به موضوع آشکارسازی اشیای پیرامون بسیار پیچیدهتر است و نکتهی دیگر اینکه آشکارسازی اشیا لزوما به معنی فهم و دریافت کامل مشخصات آنها نیست. برای نمونه اگر بخواهیم بیان کنیم، میتوانیم به رانندهی انسانی اشاره کنیم که در حال رانندگی در امتداد یک مسیر بینشهری است و در همین هنگام، توپ فوتبالی را میبیند که به جاده آمده و پیش روی مسیر خودرو قرار گرفته است. در این لحظه راننده در حالت معمول بلافاصله خودرو را متوقف خواهد کرد؛ چون احتمال میدهد که کودکی هم در همان نزدیکی و به دنبال توپ بیاید.
حالا پرسش این است که آیا حتی در صورت استفاده از هوش مصنوعی پیشرفته، خودروهای خودران هم در چنین موقعیتی این واکنش را نشان خواهند داد؟ در صورتی که موقعیت به گونهای شود که وقوع تصادف اجتنابناپذیر باشد، در آن صورت واکنش خودرو چه خواهد بود؟ آیا خودرو باید به گونهای عمل کند که تلفات و آسیبهای جانی بیرون خودرو را به حداقل برساند؟ حتی اگر این عمل به قیمت قربانی کردن سرنشینان داخل خودرو باشد؟ آیا امکان این وجود دارد که بین این دو گزینهی موجود در آن لحظه انتخابی صورت گیرد؟
این لحظهها مسلما لحظههای روتین و عادی رانندگی نیستند. بنابراین، به همراه نداشتن مجموعهی زیادی از مثالها باعث خواهد شد که در مقابل فراگیری این رویهها اندکی مقاومت به خرج داده شود.

آزمایش تورینگ
پرسش پیرامون اینکه ایا یک ماشین توانایی فکر کردن را میتواند داشته باشد یا نه برای نخستین بار در حدود دههی 1950 مطرح شده است. در آن هنگام آلان تورینگ (Alan Turing) برای نخستین بار آزمایشی را پیشنهاد داد که امروزه هم به نام خود وی شناخته میشود. اساس کار روش آزمایش تورینگ بر این است که در آن یک پرسششونده انسان، مدام برای ابزار تمایز بین اعضای دو چتروم و تشخیص اینکه کدام یک از آن دو انسان هستند، مورد سوال قرار میگیرد. اگر فرد پرسششونده نتواند میان کامپیوتر و انسان تمییز دهد در آن صورت نتیجه گرفته میشود که کامپیوتر آن آزمایش را با موفقیت پشت سر گذاشته است.
برای آزمون تورینگ امروزه ایرادات زیادی متصور هستند و این آزمایش منسوخ شده است. اما گروهی از پژوهشگران قالبی را پیشنهاد دادهاند که با عنوان آزمایش تورینگ بصری شناخته میشود و در آن کامپیوترها رفته رفته باید به پرسشهای سختتر و پیچیدهتری دربارهی صحنهی مورد بحث پاسخ دهند.
این تست، طراحان تستهای انسانی را ملزم میکند که لیستی از شاخصههای لازم برای یک تصویر مورد استفاده در آزمون را تهیه کنند. تصایر در وهلهی نخست بایستی توسط انسانها و بر اساس معیارهای داده شده نمرهدهی شده باشند. سپس همان تصاویر در برابر یک سیستم بصری کامپیوتری هم نشان داده میشود و به این ترتیب بررسی میشود که آیا کامپوتر هم توانسته است آن جزییاتی را از تصاویر دریابد که انسانها موفق به انجامش شده بودند یا خیر.
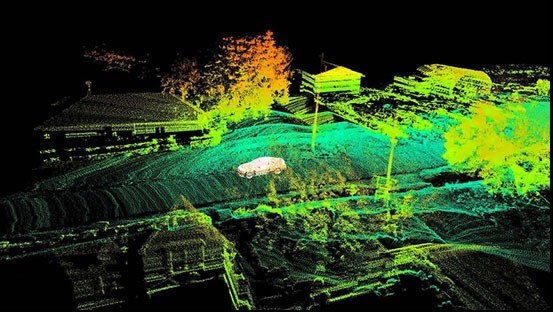
امروزه از چند مجموعهی دیتای سنجشی بصری برای آزمایش کارکرد شبکههای عصبی برحسب آشکارسازی و طبقهبندی میزان دقت آنها استفاده میشود. مجموعهی دیتای KITTI برای نمونه یکی از مواردی است که به طور گسترده به عنوان محکی برای آشکارسازی اشیا در خودروهای خودران به کار برده شده است. بنا بر گزارشها، «بایدو»، کمپانی موتور جستجویی که در چین کاربرد زیادی دارد و در صنعت نرمافزارهای خودروهای خودران هم یکی از پیشتازان است، در زمینهی بهترین جهتیابی نمرهی 90 درصدی از کل امتیازات را بر مبنای مجموعهی دیتای مذکور به دست آورده است.
در اوایل سال میلادی در نمایشگاه الکترونیک کانسومر، کمپانی انویدیا به تشریح کارکرد نرمافزار خودروهای خودران خود پرداخت که این نرمافزار بر پایهی مجموعهی دیتاهای جدید دایملر و آئودی طراحی شده بود. توضیحات ارائه شده نشانگر سطوح پیشرفتهای از آشکارسازیهای یک یا چند مرحلهای بودند و نرمافزار مذکور در آنها قادر بود تا اطلاعات بیشتری را از تصاویر ویدیویی موجود استخراج کند.
آزمایش بصری تورینگ تغییر یافته هم میتواند به صورت بالقوه برای آزمایش نرمافزارهای خودران به کار رود. البته این امر در صورتی میسر خواهد بود که چندین ورودی سنسور برای کامپیوتر تعبیه شده روی خودرو، در نظر گرفته شده باشد و به این ترتیب توانسته باشد با چالشهای رانندگی خود را سازگار کند.

اما موضوعی که وجود دارد این است که گردآوری چنین آزمایشی مسلما کار سادهای نخواهد بود. پیچیدگیهای بیشتری در حوزهی پرسشهای اخلاقی و رفتاری پیرامون خودروهای خودران وجود دارد. همچنین چالشهایی هم در زمینهی مدیریت رابط میان راننده و کامپیوتر وجود دارد؛ برای نمونه در هنگامی که یک پاسخ قابل قبول نیاز به دانش بیشتر و اضافهتری از دنیای اطراف باشد، این دشواری محسوس خواهد بود.
آخرین موردی هم که به عنوان یکی از موانع اصلی ورود خودروهای خودران به جادهها وجود دارد، عبارت است از سیاستگذاریهای پیرامون این مسئله. با احتساب اینکه آزمایشهای نهایی هم خواه شبیه آزمایش تورینگ و خواه دارای اشکال دیگری باشند، باز هم ما در حال حاضر هیچ تصور دقیقی از دستاوردهای عملی آنها در ذهن نداریم.
به گزارش زومیت، اغلب ایدههای ابداعی و نوآورانه رشد سریعی در پیش میگیرند و از سویی هم سیاستگذاران و تنظیمکنندگان سعی میکنند که همگام با آنان و به صورت بهروز در قبال آنها تصمیمگیری کنند. تنظیمکنندگان قانون، نیاز دارند که به صورت عمومی هم این پدیده را مورد بررسی قرار دهند و یک چارچوب آزمایشی و قانونی برای تعیین تناسب این فناوری برای استفادهی عمومی ایجاد کنند. آنها همچنین باید از انعطافپذیری و همچنیم از قطعیت و دقت این پدیده اطمینان حاصل کنند.
بدون حصول هر یک از عوامل ذکر شده در بالا، مسلما نیاز خواهد بود که همواره یک انسان هم در صندلی راننده بنشیند و مادامی که همهی این الزامات برآورده نشده نمیتوان شاهد گسترش خودروهای خودران به صورت وسیع در جادهها بود.
- خودروهای خودران
- تکنولوژی
- صنعت خودرو جهان
رونمایی اولین خودرو تولید انبوه با تکنولوژی ترمز الکترومکانیکی
ردپای عدد 17 طی 120 سال تاریخ صنعت خودرو
برقیسازی 80 درصدی و رانندگی خودکار سطح 4
آزمایش روبوتاکسیهای خودران استلانتیس در اروپا
نقش دولتها در صنعت خودرو جهان و ایران
مقصد جدید چین برای توسعه فناوری خودران
استقبال خودروسازان از نمایشگاه مونیخ با مدلهای جدید
رشد پرشتاب شریک «استلانتیس»
همکاری بایدو و اوبر برای گسترش خودروهای خودران
ماسک استراتژی تسلا را تغییر داد
همکاری جدید تویوتا با هوآوی ، شیائومی و Momenta
آیا توقف قیمت گذاری دستوری دردناک است؟
هشدار خودروسازان درباره توقف تولید
سرنوشت ما در زمین شطرنج خودروسازی جهان
راهکار ZF برای افزایش بُرد حرکتی خودروهای برقی
شراکت تویوتا و زیرمجموعه گوگل برای ساخت ماشین خودران
قوانین جدید چین برای تکنولوژی های خودران
خودروسازان معروف پیش از خودرو چه ابزارهایی تولید میکردند؟
تعرفههای آمریکا خودروسازان جهان را تهدید میکند
تسلا آماده عرضه قابلیت تمام خودران در چین میشود
خودروسازی جهان در تعلیق
ترامپ عامل نگرانی صنعت خودروسازی جهان شد
برنامه پکن برای توسعه خودرانها
خودروسازان بزرگ جهان در 2025
خودروساز شماره سه جهان، چه معنایی برای صنعت خودرو دارد؟
برترین خودروهای 2024
ترامپ به دنبال تسهیل قوانین آمریکا برای خودروهای خودران
ورود گوگل و کوالکام به صنعت خودرو
امنیت سایبری، مشکل جدید صنعت خودرو
ارتقای خودران مرسدس بنز
دولت استرالیا ممنوعیتهای آمریکا علیه خودروهای هوشمند چینی را زیر نظر دارد
ممنوعیت نرم افزارهای چینی در وسایل نقلیه خودران در آمریکا
ورود بانوان به صنایع وابسته به خودرو
نرمافزار چینی در خودروهای خودران ممنوع میشود
مسیر تولید ماشین های خودران به کجا خواهد رفت؟
مینیبوسهای خودران چین به ایتالیا میروند
اپل پس از لغو طرح خودروهای خودران، صدها نفر را اخراج کرد
رتبه بندی 20 خودروساز برتر جهان براساس درآمد به ازای هر کارمند
جزئیات آمار تولید خودرو در 2023؛ ایران 1 میلیون، دنیا 75 میلیون
تویوتا خودروساز شماره یک جهان شد
پیشبینی سالی پررونق برای برقیها
خودروهای برقی برنده میشوند؟
رقابت داغ برای تولید خودروی برقی ارزان
مسیر خودروسازی عوض میشود؟
ایران بیشتر از فرانسه و انگلیس خودرو تولید کرد
تور جی پی اس خودرو برای سارقان ماشین در تهران
چشمانداز صنعت خودرو تا پایان 2023
ورود دوباره ایران به باشگاه تولیدکنندگان میلیونی خودرو+ جزئیات
ایران بیشتر از آلمان، ژاپن، فرانسه و کره تولیدکننده خودروی سواری دارد
کدام کشورها بزرگترین صادر کنندگان خودروی جهان هستند؟
نقطه روشن در بازار خاکستری خودرو
عرضه عمده خودرانهای فولکس تا 2030
خودروهای قابل اطمینان کدامند؟
صنعت خودروسازی، اقتصاد جهان را از رکود خارج می کند
خودروسازان جهان به حمایت از تولید خودرو برقی شتافتند
بازار جهانی خودروهای کلاسیک داغ میشود
نیو ES7؛ شاسی بلند بسیار باکیفیت چینی+ عکس
وعده جدید ماسک درباره خودرانها
تاکسی خودران بایدو مجوز گرفت
کاهش سفارش خودروهای لوکس
خودروهای جدید در انبارهای جهان ماندگار میشوند؟
لوسید ایر گرند تورینگ؛ نمونه ای از پیوند موفق طراحی و فناوری در صنعت خودرو+عکس
رونمایی از خودروی خودران چینی
خودروی خودران بایدو رونمایی شد
کناره گیری مدیر هوش مصنوعی و سامانه خودران تسلا
کامیون برقی خودران بدون کابل برای جادههای عمومی آمریکا تایید شد
خودروسازی جهان در مسیر تسلایی شدن
انتشار آخرین آمار حوادث خودران ها
فراری علاقهای به تولید خودرانها ندارد
پای خودروهای خودران به کره جنوبی باز شد
بحران سوم در خودروسازی
خاص ترین خودروی هیوندای در کالیفرنیا پیتزا تحویل می دهد! +عکس
سریع ترین خودروهای شاسی بلند مدل 2022+عکس
رانندگی خودکار سطح 3 BMW در سال 2025 وارد بازار میشود
اولین مجوز رباتاکسی صادر شد
تقاضای بالای خودروهای خودران تسلا در سال 2022
واکنش خودروسازی جهان به جنگ اوکراین
افزایش 109 درصدی فروش جهانی خودروهای الکتریکی
چالشهای بزرگ تولید خودرو الکتریکی در ایران
در تصادف منجر به فوت خودران ها مقصر کیست؟
بدبینی استلانتیس به برقیسازی خودروها
وضع تولید ریزتراشهها در 2021
رقابت استارت آپ های خودران در چین
تخت گاز تراشه ساز تایوانی در سال 2022
تداوم کمبود تراشه و پردازشگرهای نیمه هادی در سال 2022
برندگان اصلی بازار خودرو در سال 2021
صنعت خودرو در سال 2022 با چه وضعی رو به رو است؟
تدوین دستورالعمل خودرانها در ارتباط با دوچرخهسواران
ارزشمندترین خودروسازان جهان
راز فشار تقاضا در جهان خودرو
رویای ماشین های خودران به واقعیت نزدیک تر میشود
رتبه خودروسازان بزرگ در کاهش آلایندگی
رشد 160 درصدی میزان فروش در ششماهه اول 2021
بسیاری از خودروسازان جهان تعهدات معوق داشتند
چگونه با سرمایه گذاری در صنعت خودرو سود کنیم؟
کاهش فروش خودرو در جهان به دلیل کمبود شدید نیمهرساناها
پیشبینی ضرر 210 میلیارد دلاری خودروسازان جهان در سال 2021
معرفی بهترین خودروهای برقی 2021
تولید قطعات فلزی و کامپوزیتی با چاشنی تکنولوژی
غیبت شرکت های ایرانی در بزرگترین نمایشگاه دیجیتال خدمات جانبی صنعت خودرو جهان
تسلا سیستم رانندگی در بزرگراههای خودروهای خود را ارتقا میدهد
بخشی از تاکسیهای دبی بدون راننده میشوند
-
تصادف خودروی بدون سرنشین تویوتا در دهکده المپیک توکیو
تصادف خودروی خودران تسلا با خودروهای پارک شده ادامه دارد
تعدیل بیسابقه نیروی کار در خودروسازی
ایده خودرانها بهاین زودی محقق نمیشود
جلوگیری از تصادف در خودران ها
عرضه سیستم رانندگی خودران جدید تسلا در سال 2022
رکود بازار جهانی خودرو به خاطر کمبود ریز تراشه و گسترش کرونا
بازار جهانی خودرو در حال کوچکتر شدن است
توسعه فناوری دادهبرداری سهبعدی برای تولید خودروهای خودران سطح 4 و 5
کسب و کار جدید خودروسازان لاکچری
گسترش برقیها و تاثیر آن بر خانهسازی
پرتولید ترین خودروهای جهان
تسلا سرویس اشتراک نرم افزار کمک راننده راه اندازی کرد
داده های آزمایش خودروهای هوشمند در چین قانونمند می شود
آیا کشورها با تغییرات بازار خودرو همراه میشوند؟
کدام خودروها در صف رونمایی هستند؟
بهترین شاسی بلندهای هیبریدی برتر 2021 را بشناسید + تصاویر
فناوریهای آینده در صنعت خودرو
خودروهای برقی آماده ورود به بازار
خودرو خودران و یا اتوپایلوت اصلا چیست و چگونه کار میکند؟
کدام کشور بیشترین اَبَرخودروها را دارد؟
سخت گیری قوانین ذخیره و اشتراک گذاری داده های خودرویی در چین
اعلام فهرست ارزان ترین خودروهای امسال
قول تایوانیها برای حل مشکل کمبود قطعات الکترونیکی خودرو در جهان تا ماه ژوئن
سامانه خودران تسلا فریب میخورد
کناره گیری مدیر عامل وایمو، خودران گوگل
تلاش ایران برای جبران سقوط 2 سال پیش
خودروهای تمام برقی به گزینههای سفر "اوبر" اضافه شد
تحقیق دولت فدرال روی تصادفات جدید راننده خودکار شرکت تسلا
زمان آزمایش خودرانها در روسیه
آزمایش خودروهای بدون راننده در جادههای روسیه از سال 2021
ساخت اتوبوس خودران برای حمل و نقل دانشجویان
بیمیلی به خودروهای خودران
گذر از انحصار با رقیب خارجی
کیفیترین برندهای خودروسازی از نگاه مصرفکننده
بزرگ ترین خودروسازان دنیا
آلمان آماده استقبال از خودرانها میشود
آغاز تغییر بنیادین در صنعت خودرو
عزم اپل برای ساخت یک خودروی «کاملا خودران»
عرضه باتریهای جدید خودرو در 2025
سامانه ی تویوتا برای رقابت در عرصه خودران ها
ارزشمندترین خودروسازان جهان تا پایان 2020
راهاندازی ناوگان روبوتاکسیهای کاملا خودران در چین
دوران نمایشگاه های بین المللی خودرو هم به سر آمده
آغاز گسترش خودروهای برقی، پایانی برای خودروهای دنده دستی
مایکروسافت با جنرال موتورز در توسعه خودران ها همکاری می کند
همکاری هیوندای و اپل برای تولید خودروهای الکتریکی کلید خورد
چه خودروهایی قرار است 2021 عرضه شوند؟
این خودروها به آخر خط رسیدند!
سهام اپل با خبر تولید خودروی برقی بدون راننده از سال 2024 افزایش یافت
تولید خودروی خودران برند اپل تا چهار سال دیگر
نخستین تاکسی خودران آمازون رونمایی شد
اوبر بخش خودران خود را هم می فروشد
خودروهای بدون راننده تا سال 2030 جادهها را فرا میگیرند
آینده مبهم صنعت خودروسازی جهان در سایه کرونا
تویوتا طرح یک سیستم سوختگیری خودکار را ثبت کرد
تحویل دارو با خودروهای خودران سبز در انگلیس
نرمافزار جدید تسلا قادر است مداخلات راننده را تا یکسوم کاهش دهد
-
خودران شدن اتومبیلهای فورد با پرداخت 1595 دلار
تحقق رویای خودروهای خودران در مراحل پایانی
پرفروش ترین خودروهای برقی در جهان روی نقشه
تاکسیهای خودران وایمو در اختیار عموم قرار گرفتند
غولهای خودروسازی جهان از دولت آمریکا شکایت کردند
حفظ جان سرنشین مهمتر است یا پیاده؟
کدام کشورها آماده خودروهای بدون راننده هستند؟
رای دادگاه آلمانی علیه تسلا
آزمایش خودروهای خودران چینی در شانگهای
آزمایش فناوری خودروهای خودران در چین
آمازون خودروی خودران می سازد
مرسدس و انویدیا سیستم خودران خودرو می سازند
بزرگترین تولیدکنندگان خودرو کدامند؟
رشد 36 درصدی فروش خودروهای برقی در سال آینده
تاثیر کرونا بر صنعت خودروی جهان
هواوی به توسعه خودروهای 5G کمک می کند
تاوارز مدیر سال خودروسازی
آغاز فعالیت وایمو برای تولید خودروهای خودران در فونیکس
ویژگی "کاملا خودران" تسلا به شکل حق اشتراک ماهانه عرضه میشود
عقب نشینی آئودی از سیستم «ترافیک جم پایلوت»
زیان غولهای خودروسازی در ایام کرونا
ویروس کرونا چه بلایی بر سر «خودروسازان» آورده است؟
استفاده از ماشینهای بدون سرنشین با فناوری اینترنت 5G
فروش خودرو در جهان چقدر کاهش یافت؟
10 خودرو پرفروش دنیا در سال 2019 معرفی شدند
ارزانترین خودروهای سال 2020 را بشناسید
سایه کرونا بر زنجیره خودروسازی
تاثیر ویروس کرونا بر صنعت خودروسازی
جمعآوری نمونههای آزمایش کووید-19 با خودروهای خودران
خودروسازان دست به کار شدند
خودروهای برقی باید «همه پسند» باشند
سرمایهگذاری تویوتا در خودرانها
آینده جهانی رانندگی
مجلس نمایندگان آمریکا درباره آینده خودروهای خودران تصمیم میگیرد
تبدیل موضوع خودروهای برقی به پروژه کلان در شورای عالی انقلاب فرهنگی
ایجاد ارزش افزوده مضاعف با روی کار آمدن خودروهای خودران
کرونا صنعت خودرو جهان را تهدید میکند
تسلا دومین خودروساز ارزشمند جهان قرار گرفت
فروش خودروی خودران سطح 3 در کره جنوبی
"بوش" برای خودروهای خودران "لیدار" میسازد
کاهش ترافیک خودروهای خودران با تقاطع هوشمند
تمام «خودران» هوندا از راه میرسد
شکوفایی خودروهای الکتریکی در سال 2019
ادامه رکود خودروسازی جهان در 2020
بزرگترین خودروسازان جهان در سال 2019 معرفی شدند+جدول فروش
خودروهای برقی و تعدیل هزاران کارگر
حرکت هیوندای به سوی خودرانها
پیش بینی افت 4 درصدی فروش خودرو در جهان طی امسال
از خودروهای خودران تا نسل پنجم اینترنت
پیشبینی فیچ از رکود خودروسازی
آینده بدون راننده
خودروهای خودران، نیاز فردای کشور
انتشار اسنادی جدید از تصادف مرگبار خودروی خودران اوبر با دوچرخه سوار
تولید خودروی خودران در ایران صرفه جنبه تبلیغاتی دارد
ایران در مسیر خودروهای خودران
دستیابی به فناوری تولید خودروهای خودران بومی تا 5 سال آینده
چهارمین خودروساز بزرگ جهان متولد میشود
اعتصاب کارگران 3 میلیارد دلار روی دست جنرالموتورز گذاشت
ساکنان کالیفرنیا مجانی سوار تاکسی خودران می شوند
خودروی خودران که سلامت سرنشینان را رصد می کند
چین از خودرو خودران قابل استفاده در معدن رونمایی کرد
تویوتا برای سالمندان خودروی برقی می سازد
توسعه فناوری خودروی بدون راننده در دستور کار قرار گرفت
خودروهای پرنده زودتر از خودروهای خودران زمینی آغاز به کار میکنند
شرکت اوبر آزمایش خودروهای خودران را بار دیگر از سر گرفت
10 تجربهی تلخ در تاریخ خودروسازی + تصاویر
خطر حذف 12000 شغل مرتبط با صنعت خودرو
دستگاه تصفیه هوای خودروهای خودران
همکاری سونی و یاماها برای ساخت خودروی بدون راننده برای شهربازیها
خودروهای خودران بدون فرمان و پدال ترمز ساخته شوند
مسابقات خودروهای خودران
توسعه خودروهای خودران با سوءاستفاده از کارگران فقیر
سونی وسیله نقلیه خودران می سازد
ارابههای هوشمند
خودروهای خودران اوبر ضربان قلب مسافران را می سنجند
سلطان باواریا از کجا آمده؟!
میراث دتوماســو
هک شدن 20 درصد از خودروهای خودران موجب اختلال در ترافیک جهان خواهد شد
کاهش 5 درصدی تولید جهانی خودرو تا پایان سال جاری
چین خودرو بدون راننده در عربستان و امارات میسازد
تسلا تمام خودران خود را گران کرد
خودرانهای بدون راننده خطر «امنیتی» دارند
فورد و فولکس واگن خودروی خودران میسازند
کاهش قیمت فناوری "لیدار" برای خودروهای خودران
خودروهای خودرانی که میلیاردها مایل رانندگی کردهاند
اقدام جدید جنرال موتورز برای تولید خودروهای خودران
خودروهای خودران 2024 راهی بزرگراه ها می شوند
فرصتها و چالشهای خودروسازی در 2019
"وایمو" آزمایش خودروهای خودران را در کالیفرنیا آغاز میکند
پنج تحول بزرگ صنعت خودرو در جهان
رانندگان بد معلم خودروهای خودران می شوند
افزایش آزمایش خودرو برقی "جگوار" توسط "وایمو"
پیتزای خود را با خودروی خودران تحویل بگیرید+عکس
خودروهای تمام خودرون اوبر رونمایی شد
نقل و انتقال کالا از بنادر سوئد با خودران های ولوو
همکاری غولها برای توسعه خودروهای برقی و خودران
خودروهای خودران میتوانند مالک را زیر نظر داشته باشند
اپل یک استارتاپ رانندگی خودران را میخرد
بزرگترین تولیدکنندگان خودرو جهان کدام هستند؟
عزم جیلی برای ساخت خودرانها
خودروهای خودران توانایی مسیریابی انسان را پیدا میکنند
بهبود 35 درصدی سرعت ترافیک با خودروهای خودران
خودروهای خودران سرعت عبور و مرور را افزایش میدهند
خودروهای خودران جدید می ترسند
امنیت به خودروهای خودران و هوشمند میآید
خودروهای خودران گوگل در اختیار عموم قرار می گیرد
ربات پلیس امنیت جادهها را تضمین میکند
تداوم کاهش تولید خودرو در بریتانیا
جگوار لندرور، اطلاعات ترافیکی و فنی خودروهای خود را میخرد
آسمان تیره صنعت خودرو
روش کمهزینهای برای متحول کردن آینده خودروهای خودران
سال بد اقبالی خودروسازان جهان
خیابان های اروپا در انتظار خودروهای خودران!
همکاری خودروساز کرهای با چین برای توسعه خودروهای خودران
خودروهای تسلا از پارکینگ به پیشواز راننده می آیند
چرا تبعیض نژادی در خودروهای خودران پررنگ است؟
همکاری غولهای خودروسازی برای تدوین استانداردهای ایمنی خودروهای خودران
مروری بر پرفروشترین خودروهای سال 2018
برترین و بدترین برندهای خودرویی 2019
رکورد فروش 400 هزار دستگاه به کدام خودروی برقی رسید؟
مینی بوس های خودران در نیویورک و کالیفرنیا حرکت می کنند
تحلیلی بر صنعت خودرو و حملونقل جهان
من هرگز سوار خودرویی نمی شوم که کامپیوتر هدایتش می کند!
فورد؛ مردی که خودرو را مردمی کرد
5 روند مهم در نمایشگاه خودروی ژنو
تکنولوژی خودروهای خودران چیست؟
ارزانترین خودروهای جهان در کجا تولید میشوند؟
عدم تشخیص تیرهپوستان توسط خودروهای خودران
خودروهای خودران آمار تصادفات رانندگی را بالا میبرند!
مراقب خودروهای خودران باشید
سرمایهگذاری 58 میلیارد یورویی خودروسازان آلمانی در تولید خودروهای خودران و الکتریکی
نقشهبرداری تویوتا با دوربین برای خودروهای خودران
بامو و دایملر مشترکا خودرو خودران میسازند
تقویت بینایی خودروهای خودران!
شرکتهای خودروسازی ارادهای برای استفاده از تکنولوژی روز ندارند
زشتترین خودروهای جهان کدامند؟! +تصاویر
سوپرکار جدید مکلارن رونمایی شد +تصاویر
ورود خودرانهای پژو به چین
خودروهای خودران ترافیک را بدتر می کنند
شناسایی کارمندی که اطلاعات خودرو خودران اپل را برای پکن ارسال می کرد
تلاش مایکروسافت برای به ثمرنشستن خودروهای خودران
پروژه خودروی خودران اپل در هالهای از ابهام
دوچرخههای خودران جای تاکسیهای اینترنتی را میگیرند
تویوتا خودروهای خودران را ایمن میکند
گواهینامههایتان را تمدید نکنید، خودروهای خودران در راهاند
از تصادف خودران ها تا افشای اطلاعات
خودروی خودران 3099 مایل سفر کرد
اپل درصدد ورود به صنعت خودروهای خودران
غول آلمانی لوازمخانگی به سوی خودروهای خودران میرود
خودران کاری هوندا، از آتشنشانی تا برفروبی
ایمنترین خودروهای جهان کدامند؟
ایمنترین خودروهای 2018 اعلام شدند
طرح اولیه تایری عجیب برای خودروهای خودران
سیستم خودران تسلا وارد خودروهای امدادی می شود
آخرین تکنولوژی خودروی جهان در نمایشگاه چین +عکس
افسار صنعت خودروهای خودران در دستان فورد
همکاری بایدو و فولکس واگن برای تولید انبوه خودروی خودران در چین
اوبر پروژه خودروهای خودران را احیا کرد
کدام کشورها برای خودروهای خودران آمادهترند؟
تسلاموتورز قید خودروهای کاملا خودران را زد!
رونمایی از تاکسیهای بدون راننده در دوبی
تولید دوربین برای خودروهای خودران با الهام از میگو
رونمایی هواوی و آئودی از نوآوریهای مشترک در زمینه خودروهای خودران سطح 4
سیستم هشدار صوتی خودروهای برقی جان عابران را نجات می دهد
خطر خودروهای هوشمند برای سلامت انسان
خودروهای خودران به زودی وارد جادههای آمریکا میشود
خودروی خودران آینده با یک انگشت کنترل می شود!
خودروهای خودران، قابل اعتماد نیستند
هند؛ مقصد صادراتی جدید خودروسازان
تلاش شرکت های خودروساز برای وضع استانداردهای جامع محصولات خودران
فولکس واگن بهدنبال توسعه صنعت خودروهای خودران
خودروی "ولوو" به اتاق خواب تبدیل میشود!
خودروی خودران "اپل" تصادف کرد
خودروی خودران با چشم مجازی آزمایش می شود
-
ابداع حسگری برای تسهیل جراحی مفاصل و افزایش ایمنی خودروهای خودران!
اوبر و تویوتا همکاری می کنند
استفاده از "رادارهای زمین نفوذ" در خودروهای خودران
افتتاح بقالی خودران در آریزونا
خودروساز آلمانی تمایلی به توسعه خودروهای خودران ندارد
ارتباط سرنشینان خودروهای خودران با یکدیگر از طریق فیس تایم
آغاز فصل جدید همکاری استراتژیک هواوی و آئودی برای گسترش خودروهای هوشمند
رسواییهای بزرگ صنعت خودروسازی در جهان
خودروسازان جهان به چه قوانین محیطزیستی پایبندند؟
بوش آلمان به فناوری خودروهای خودران وارد میشود
ساخت سیستمی که خطرات جاده را پیش بینی می کند
معروفترین مهندسان خودرو را بشناسید
اطلاعات 100 شرکت خودروسازی افشا شد
ایمنترین خودروهای سال 2018 معرفی شدند
خودرو در قلب جنگ تجاری
رکوردشکنی خودروی خودران در افزایش ارتفاع
مداخله دولت آمریکا در صنعت خودرو
کارمند "اپل" متهم به دزدیدن فناوری خودروهای خودران و تلاش برای فرار به چین شد
کدام خودروهای مفهومی پس از تولید جذابتر شدند؟
5 تغییر اساسی که باعث شده در دهه جاری، بازار خودرو شبیه به هیچ زمانی نباشد!
تحویل کالا با خودروی خودران آزمایش می شود
خودروسازی در بیراهه جنگ تجاری
بررسی خودروهایی که در نسلهای اخیر، مشتریان متفاوتی را جلب کردهاند
دید خودروی خودران تسلا چگونه است؟
ماهاتیر محمد و رویای تولید خودروی ملی جدید
معرفی خودروهایی که طراحی بیرونی آنها در ابتدا برای برند دیگری انجام شده بود
ماده ای که تولید خودروهای خودران را دگرگون می کند
فناوری خودروهای خودران به زمین فوتبال رسید
ستارگان 4 چرخ
فولکس واگن برای اپل خودروی خودران می سازد
همکاری اپل با شرکت فولکسواگن برای توسعه خودروهای خودران
معرفی خودروهایی که قرار بود برای همیشه بروند، اما ماندنی شدند
تست خودران ب ام و در چین
تعداد خودروهای خودران اپل به 55 اتومبیل رسید
هدایت خودروهای خودران در جادههایی که در نقشه نیستند
تسلا خودروهای خودران را اشتراکی می کند
بازوی هوشمند
تصادف خودروی خودران «تسلا ایکس» در فلوریدا
راه اندازی خودروهای خودران در سطح وسیعی از خیابانهای آمریکا
بررسی و تحلیل وضعیت عوامل موثر بر مدیریت تحقیق و توسعه و رتبه بندی عوامل با تکنیک ANP در صنایع خودروسازی
حملات سایبری صنعت خودرو را تهدید میکند
نصب تاسیسات آزمایش خودروهای خودران در بزرگراه ها برای اولین بار
مجوز حمل مسافر با خودروهای خودران در آستانه صدور
خودروسازان، قربانی جنگ تجاری
چرا XC60 بهترین خودروی سال جهان است؟ (+عکس)
همکاری وایمو و هوندا برای تولید خودروی خودران باربری
از تحویل پیتزا تا خواندن ذهن راننده+ تصاویر
حق امتیاز جدید واقعیت مجازی برای خودرو خودران ثبت شد
خودروهای خودران تا چه اندازه ایمنی دارند؟
5 خودرو شاسی بلند 2019 که ارزش صبر کردن برای خرید را دارند+ تصاویر
توقف تست خودران های تویوتا
پاکسازی باند فرودگاه با برفروب خودران مجهز به کنترل از راه دور
تصادف مرگبار تردد ناوگان خودروهای خودران "اوبر" را متوقف کرد
علاقه به انحراف
عزم جنرال موتورز برای تجاریسازی مدلهای خودران
فراموششدگان بازار لوکس
تاریخچه کمپانی ژاک ساوتشیک؛ آمیزه هنر و صنعت
معرفی 3 خودرو قویتر از 500 اسب بخار و ارزانتر از 100 هزار دلار
سرگرم کردن مسافران با اختراع اوبر
استفاده از فناوری کوانتومی برای ارتقای امنیت خودروهای خودران
طرح اولیه از خودروی خودرانی که پهپاد می شود
طرح اولیه مسافرکش های خودران رونمایی شد
خودروهای خودران برای دیدن موانع از لیزر استفاده خواهند کرد
تعرفههای تازه لرزه بر اندام خودروسازان انداخت
سرمایه گذاری 2.8 میلیارد دلاری تویوتا برای تولید خودروهای خودران
سرمایهگذاری تویوتا در فناوری خودران
آزمایش خودروی خودران فورد در خیابانهای میامی
شستشو، خودروهای خودران را خنگ می کند
همکاری تویوتا و اوبر برای خودروهای خودران
آغاز آزمایش خودروهای کاملا خودران در کالیفرنیا
الزام صنعت خودرو به سمت افزایش تحقیق و توسعه
آشنایی با چند ویژگی کمکی خودروهای خودران و نیمهخودران
پیشرانههای امروزی چه تفاوتهایی با پیشرانههای قدیمی دارند؟
پروژه خودروی خودران به سودآوری آلفابت لطمه زد
این خودروی خودران 40 مرسوله را به مقصد می رساند
«درخت فامیلی» خودروسازان جهان
آشنایی با برند فارادی فیوچر؛ تولیدکننده خودروهای الکتریکی
5 سوپراسپرت ناموفق در تاریخ؛ لشکر شکستخورده
خودروی خودران تحویل محموله رونمایی شد
کامیون خودران سرعتی تسلا 2019 می آید
آزمایش خودروهای خودران اپل در کالیفرنیا
خودروی خودران پلیس رانندگان خاطی را ردیابی می کند
سوئد اتوبوس های خودران الکتریکی آزمایش می کند
چشمانداز صنعت خودرو در سال 2018
آغاز آزمایش خودروهای خودران "وایمو" در آتلانتا
خودروهای باهوش تا سال2050 خیابانها را تصاحب میکنند
خودروی خودران تسلا زودتر از تصور عرضه میشود؟!
حضور آریزو5 خودران در نمایشگاه خودرو CES
نرم افزار ضد هکر برای خودروهای خودران
تولید انبوه نیسانهای خودران تا 2021
رنو رکورد فروش جهانی خود را شکست
جنرال موتورز خودرو تمام خودران بدون فرمان و پدال میسازد
سرگذشت تنها داج چارجر R/T مدل 1968 ایران؛ درباره هیولای بَدخو!
اولین اتوموبیل های مجهز به سیستم خودران اینتل سال 2018 به خیابان می آیند
چین خودروی خودران تولید می کند
رنو سهام یک گروه رسانهای خودرو را خرید
معرفی نسل جدید خودروهای خودران تویوتا
سازندگان گوشی هوشمند، خودروی خودران میسازند!
خودرانها در نمایشگاه لوازم الکترونیک
تویوتا سومین خودروساز جهان شد
طراحی نرم افزار رایگان برای خودران کردن خودروها
پورشه 911 Carrera T ؛هیجان کمهزینه با 911
آپولو Intensa Emozione؛ ابرخودرو 2.6 میلیون دلاری آپولو
مروری بر اینترنشنالترن استار؛ اصالت ماندگار
کوالکوم هم خودروی خودران ساخت
فرمان خودرویی که با حرکات صورت کنترل می شود!
استون مارتین DB11 Volante 2018؛ بُعد تازهای از زیبایی
تویوتا سنچری 2018؛ یک تویوتا در کلاس رولزرویس و بنتلی!
بهترینهای صنعت خودرو در لباس پلیس!
رونمایی از فناوری تازه شناسایی موانع در خودروهای خودران
تراشه هوش مصنوعی تسلا برای خودروهای خودران در راه است
حمله سخت جرمی کلارکسون به خودروهای خودران
تصور جذاب سوزوکی از آینده جیمنی
ابرخودرویی 920 اسبی از کانادا!
حضور تاکسی خودران در ژاپن از سال آینده
فیسکر اوربیت، شاسیبلند هوشمند
به اشتراک گذاری خودروهای خودران عملیاتی می شود
مزدا خودران نمیشود
در چهارمین روز برگزاری دومین نمایشگاه خودرو تهران؛ اسپری آبگریز خودرو و موتورسیکلت نانووا رونمایی شد
این ویزور دوچرخه سواری 98 درصد اشعه های مضر را دفع می کند
راهاندازی مرکز آزمایش خودروهای خودران در سنگاپور
تکنولوژی هایی که صنعت خودرو را متحول کردند
صنعت خودروی جهان در سراشیبی
مقایسه هزینه تحقیق و توسعه صنعت خودرو در ایران و جهان
سفارش خرید 24 هزار خودروی خودران توسط اوبر
پایگاه خبری «عصرخودرو» 8 ساله شد
خودرانها در خیابانهای انگلیس
نمادهای خودرویی چگونه خلق میشوند؟
تکنولوژی حرف اول فروش خودرو در دنیا
احداث لاین مخصوص خودروهای خودران در آمریکا
طراحی سیستم شناسایی حرفه ای موانع برای خودروهای خودران
رونمایی از سریعترین خودرو دنیا
تویوتا به دنبال خودران شدن
پدیدههای خودرویی 2018
تست خودروی خودران نیسان موفقیتآمیز بود
جابجایی مسافر با خودروی خودران در کمبریج
برق مصرفی هوش مصنوعی، بلای جان خودروهای بدون راننده
عکس خودروی خودران اپل منتشر شد
انتقال تکنولوژی باید سرفصل سرمایه گذاریها باشد
فرمول اینتل برای امنیت خودروهای خودران
فورد در مسیر ساخت خودرانها
انجمنها، پل نمایشگاههای بینالمللی
پست آلمان مشتری خودروهای خودران
آغاز تولید انبوه خودروهای خودران در چین تا سال 2019
مرکز ملی توسعه فناوری خودروهای خودران هوشمند ایجاد میشود
-
بررسی سیستم اتوپارک؛ پارک خودرو از دیروز تا امروز
معرفی خودروهای آینده توسط یک شرکت ژاپنی (+عکس)
تراشه رایانه ای برای تولید خودروی خودران ساخته شد
خودروهای خودران نقاط کور را می بینند
جنرال موتورز به یاری ارتش امریکا آمد +عکس
2017 BMW 540i vs 2017 Genesis G80 Sport؛ شاخ و شانه یک کُره ای برای بامو
نگاهی به خودروهای اسپرت ناموفق تاریخ؛ جواهرات ناکام!
مروری بر تاثیر سیر تکامل بال عقب در خودرو و چگونگی عملکرد آن؛ آیرودینامیک خودرو به زبان ساده
مدل روسی عبور خودروسازی از تحریمها
مخابرات خودرویی
نیازی برای بیراههها
حیات وحش روی چهار چرخ
«دو چالش و سه راهکار» خودروسازی جهان
سرمایه گذاری 1.5 میلیارد دلاری غول اینترنتی چین روی خودروهای خودران
سامسونگ به دنبال حضور در بازار خودروهای خودران است
استفاده از دوربین های حرارتی برای پیشبرد فناوری خودران
اولین خودروی خودران جنرال موتورز آماده تولید است
خودرانها قانونمند میشوند
10 خودروی مدرن نیمه خودران
استفاده از خودروی خودران برای تحویل پیتزا+تصاویر
تحویل پیتزا با خودروی خودران+عکس
فرمان خودروهای آینده از خودرو مراقبت می کند
آیندهنگاری خودروسازی در انقلاب 2030
کنگره آمریکا برای استفاده از خودروهای خودران قانون وضع میکند
این خودرو مسافرانش را انتخاب می کند!
آینده اشتغال در صنعت خودروی جهان و ایران
زیمنس یک شرکت متخصص در فناوری خودران را میخرد
درآمدزایی 20میلیون دلاری "خودرانها" برای "هنر هفتم"! +عکس
تقریبا نیمی از مردم علاقه ای به خودروهای کاملا خودران ندارند
فناوری تازه خودروها را بینا می کند
پای ایران به بازارهای جهانی خودرو باز میشود
تردید در ایمنی خودروهای خودران
آزمایش کامیونهای بدون راننده در جادههای انگلیس
نمایشگاه بین المللی خودرو دبی (Motor Show) در یک نگاه
کارمندان اپل با خودروهای خودران جابجا می شوند
فناوری خودران بیش از حد بزرگ نمایی شده است
فیات- کرایسلر و ب ام و همکار شدند
اختراع تویوتا برای دید 360 درجه رانندگان
جاده ها حذف می شوند!
تویوتا به دنبال رونمایی از خودروهای نیمه خودران در المپیک 2020
تولید ملکه باتریها برای خودروهای برقی
100خودرو خودران سطح 4 وارد جادهها میشود
تولید فیلترهای خودرو با فناوری نانو توسط محققان کشور
صدور دستورالعمل جدید امنیت سایبری برای خودروهای هوشمند در انگلیس
فریب دادن خودروی خودران به راحتی آب خوردن!
استرالیاییها با ته سیگار آسفالت ساختند
خودروی ساخت دانشگاه آزاد شماره گذاری می شود
هند خودروهای خودران را ممنوع کرد
سیستمهای هوشمند و خودران اپل تنها برای خودروها ساخته نمیشود
هدست واقعیت مجازی ؛کوله پشتی ویژه طراحی خودرو
راهکار جهانی انتقال فناوری در خودروسازی
در این خودرو دستاندازها احساس نمیشود
MIVEC ،تکنولوژی اختصاصی خودروهای میتسوبیشی
هند استفاده از خودروهای خودران را ممنوع میکند
نمایش پارکینگ خودران بنز در آلمان
استراتژی همسو شدن با تحولات جهانی خودرو
تولید نرم افزاری برای جلوگیری از هک شدن خودروهای هوشمند
از این پس گوگل به شما می گوید کی به دل جاده بزنید
چشمانداز خودروی جهان تا 2040
خودروی خودران آمبولانس و ماشین پلیس را شناسایی می کند
پیشرفته ترین خودروی خودران رونمایی شد
همکاری رنو با یک سازمان دولتی در زمینه خودروهای خودران
اولین تسلا مدل 3 از خط تولید خارج شد+تصاویر
دستمزد مدیران خودروسازی جهان
خیابانهای پر هرج و مرج هند، چالشی سر راه فناوری خودران
کانگوروها صنعت تولید خودروهای خودران را فلج کردند
گشت زنی خودروهای پلیس بدون راننده در دبی
رباتهای راننده با هم صحبت میکنند
ولوو نسل جدید خودروهای خودران را می سازد
هوندا تا سال 2025 خودروی خودران سطح 4 عرضه می کند
ورود "جگوار لندرور" به عرصه خودروهای خودران
مخالفت پلیس با تردد خودروهای هوشمند بدون راننده در کشور
در حال کار روی فناوری خودروهای خودران هستیم
تست موفقیت آمیزاولین سیستم هوشمند کنترل خودرو بدون راننده درایران
با سطح 4 فناوری خودروهای خودران آشنا شوید
سیستم مسیریابی جدید بوش و تام تام برای خودروهای خودران
کیسه هوای خودروهای خودران هم از راه می رسد
خودروی سوئدی با فضای داخلی متغیر
خودروهای خودران ارسال کالا در راهند
استفاده از خودروهای خودران برای مبارزه با جرایم
حضور یک خودروی خودران در مسابقات اتومبیلرانی
خودرو خودران روس ها به بازار آمد
اپلیکیشنی که خودروها را شناسایی میکند
حضور خودروهای بدون راننده در مسابقات اتومبیلرانی برای اولینبار
روش تست خودروهای خودران تغییر میکند
سرنوشت مدیران خودرویی در گرو تغییرپذیری
هدایت آرسی از طریق ذهن
دستگاه فروش خودکار 47 متری ماشین های لوکس در کشور سنگاپور افتتاح شد
غزل تلخ خداحافظی
خودروهای فورد هوشمند شدند
تست فناوری خودران گوگل برای مردم عادی
وایمو و لیفت متحد شدند
همکاری دو غول فناوری برای تولید خودروهای خودران
آزمایش خودروهای خودران در داخل آلمان قانونی شد
همکاری تویوتا و nvidia برای توسعه فناوری خودران
واکنش صنعت خودرو به انتخابات فرانسه
سوناتای پاک با قیمت رقابتی آمد
شهر خودروهای خودران در کره جنوبی
فیلمبرداری تسلا از جادهها برای بهبود فنآوری خودران
ب ام و iNext رقیب جگوار I-Pace خودران خواهد بود
جمع آوری اطلاعات عادات رانندگی افراد توسط تسلا
وعده انتخاباتی با چاشنی خودرو
صنعت به تکنولوژی روز دنیا تجهیز شود
پژو به دنبال فنآوری خودروهای خودران است
سامسونگ خودرو خودران می سازد
خودروهای خودران ما زودتر از انتظارات خواهند آمد
برای تولید خودروهای خودران به دنبال شرکای بیشتری هستیم
رونمایی فولکس واگن از اولین خودروی خودران ساخت این شرکت
مدیر بخش خودروهای خودران اوبر استعفا کرد
خودرو خودران با قابلیت تغییر رنگ
ابداع فناوری اختصاصی چینیها برای تولید خودروهای خودران
مجوز اپل برای تست خودروهای خودران در کالیفرنیا صادر شد
مرسدس-بنز و بوش به طور مشترک خودروی خودران می سازند
فرمان آینده خودروسازی در دست کیست؟
این خودرو به راننده نیاز ندارد
سریعترین ماشین پلیس جهان
اسپرتی ترین اسپرت های بازار
-
تاکسیهایی که روی آب حرکت میکنند +عکس
نادرترین مکلارن F1 را ببینید +تصاویر
دماغ بریده ها
عجیب ترین سبک انتقال
پاکسازی هوا با بیلبوردهای تبلیغاتی!
رنگهای مشکی و خاکستری در خودرانها خطر مرگ را افزایش میدهد
بازارهای نوظهور عامل رشد خودرو در 2017
ایجاد شبکه حمل و نقل خودران برای اتصال 2 جزیره
خرید 15 میلیارد دلاری اینتل برای ورود به بازار خودروهای خودران
اینتل رسما وارد رقابت خودروهای خودران شد
ایو؛ خودروی خودرانی که اتاق نشیمن دارد!
خودرو تمام خودران تا 2020 ساخته می شود
سکوی جهانی خودروسازی ایران
خودرو خودران لکسوس با گذشت زمان هوشمند تر میشود
درخواست جیلی در چین برای تسریع طراحی فناوری خودران
معرفی اولین خودروی مسابقه ای خودران+تصاویر
نخستین خودرو خودران مسابقه ای رونمایی شد
کانسپت آیندهنگرانه پژو را ببینید+تصاویر و مشخصات
تست اولین خودروی خودران نیسان در اروپا
"چالش دوچرخه" فناوری خودروهای خودران!
شکایت وایمو از اوبر برای سرقت اطلاعات فناوری لیدار
برای خرید خودروهای خاص باما همراه شوید + مشخصات و قیمت
نکاتی برای انتخاب بهتر در بازار خودرو
مهندسان فورد از عملکرد ماشینهای بدون راننده راضی نیستند
جنرال موتور هزاران خودروی خودران را آزمایش میکند
توسعه دوربین فوقسریع برای پهپادها و خودروهای خودران
تولید و آزمایش هزاران خودروی خودران توسط جنرال موتورز
همکاری تویوتا با استنفورد و ام آی تی در زمینه خودروهای خودران
تویوتا و جنرال موتورز تغییر مقررات راهنمایی را خواستار شدند
-
سوبارو مجوز تست فناوری خودران در کالیفرنیا را گرفت
مجوز سوبارو برای تست خودروهای خودران در کالیفرنیا
تکنولوژی کلید شکوفایی اقتصادی است
سرمایه گذاری 1 میلیارد دلاری فورد در یک شرکت فناوری خودران
خودروهای بدون راننده عابر پیاده را ردیابی می کنند
ایجاد محدوده تست خودروهای خودران
خودروهای خودران در انگلیس بیمه میشوند
خطرناکترین قسمت یک خودران شما هستید
ورود خودروهای خودران دایملر در ناوگان اوبر
الگوریتم تعامل خودروهای خودران با خودروهای معمولی طراحی شد
پیام ترامپ واضح است، تولید در آمریکا باید در اولویت باشد
افزوده شدن فناوریهای جذاب به خودروهای خودران
مهمترین کارخانههای خودروسازی در سال 2017
دونالد ترامپ یک لیموزین زرهی جدید خواهد داشت+تصاویر
تست خودروهای خودران نیسان در خیابانهای لندن
سنگاپور کامیون های خودران را جایگزین نیروی انسانی می کند
فناورانههای خودروهایی که منتظرشان هستیم
سال برقیها؟ خودرانها؟ یا هیچکدام؟
جعبه جادویی وستفیلد
رقابت نفسگیر درون خودرانی !
خودروهای الکتریکی چگونه مترادف خودروهای خودران شدند؟
تست خودروهای خودران کرایسلر و وایمو در کالیفرنیا و آریزونا
فولکس واگن و آئودی با کمک NVIDIA خودروی خودران میسازند
طراحی یک ابررایانه برای هدایت خودروهای خودران
آغاز کابوس فناوری خودروسازان سنتی
خودروسازان در دوراهی فنی – فناوری
توفان تغییر آغاز شد
چالشهای صنعت خودرو در 2017
کودکان امروزی، رانندگی را تجربه نخواهند کرد
-
نوآوریهای متحولکننده صنعت خودرو
خودروهای خودران فورد 3 برابر میشود
آزمایش خودروهای خودران در نروژ
آیا آینده خودروها به این شکل است؟
رونمایی و آغاز تست شورولت بولت خودران در میشیگان+تصاویر
انقلابی دیگر در صنعت خودرو
اوبر دریافت مجوز برای آزمایش خودروی خودران را نپذیرفت
خودروهای آینده با اثر انگشت روشن می شوند
ترس از خودرانها کی تمام میشود؟
تردد خودروهای خودران رسما در میشیگان مجاز شد
یک کانسپت به معنای واقعی خودران+تصاویر
آزمایش فناوری خودروهای خودران در کالیفرنیا
حرکت خودروهای خودران در ایالت میشیگان قانونی شد
سمتوسوی صنعت خودرو در 2017
صنعت خودرو جهان در 2017
خودروهای خودران ب ام و در ناوگان خودروهای کرایه ای
گام جدید ب ام و برای عرضه خودروهای خودران
افشای تلاش اپل برای ورود به بازار خودروهای بدون راننده
سرمایه گذاری کلان اپل در پروژه ساخت خودروی خودران
ولوو فضای داخلی خودرانها را متحول میکند
آزمایش نخستین خودروهای خودران کانادا در اونتاریو
اونتاریو میزبان تست 3 خودروی خودران میشود
نور آفتاب چطور به خودرو آسیب میزند؟
خودروهای خودران، پایان عصر اتومبیلهای سنتی را رقم میزنند
پایان همکاری ب ام و و غول اینترنت چین در زمینه خودروهای خودران
آغاز به کار نمایشگاه خودرویی لس آنجلس+تصاویر
زوایایی که ترامپ در خودروسازی نمیبیند
جهش 8 میلیاردی سامسونگ روی خودروهای هوشمند
سرمایه گذاری 250 میلیون دلاری اینتل برای تولید خودروهای خودران
پیشرفته ترین خودروهای سال 2017 +عکس
ساخت اتومبیل خودران خاص برای معلولان
مضحک ترین خودروها در نمایشگاه SEMA 2016+تصاویر
خودرویی که تنها یک بار تولید شد! +عکس
4 کانسپت خودران منحصربفرد کیا+تصاویر
اولین پورشه ساخت آمریکا بهفروش میرسد
اسمارت و فلسفه خودروهای کوچک
وقتی چلنجر دو دف میشود
چشمهایی به سبک اشکودا
آغاز فروش نیسان بیرحم
اولین اسب مارانلو
اولین کامیون خودران جهان آزمایش شد
آینده مزدا روی موتورهای دورانی استوار خواهد بود
توقف عرضه کیت خودروهای خودران با هشدار دولت آمریکا
خیز سایک موتور برای تولید حسگرهای خودروهای خودران
تسلا تمام خودروهایش را خودران میکند
رشد 10 درصدی بازار خودرو در روسیه
تصادف تاکسی خودران در سنگاپور
اپل از ساخت خودروی هوشمند منصرف شد
غرامت خودروساز آلمانی به وکلای آمریکایی
5 خودرو برتر نمایشگاه پاریس+تصاویر
سرمایهگذاری مشترک ب ام و و تویوتا برای تولید خودروهای خودران
این پیادهرو شارژ میشود
احیای دایتونا با اهدای اعضا !
رکورد فروش خودرو در بریتانیا
کالیفرنیا به خودروهای خودران بدون فرمان و ترمز مجوز داد
طراحی خودروی خودران شخصی به سلیقه مشتری
اتحاد بیامو،مرسدس و آئودی در مقابل گوگل
نقشه دیجیتالی امکان یافتن پارکینگ را برای رانندگان فراهم می کند
خودروهای بدون سرنشین
چشمانداز 5 سال آینده صنعت خودرو
اپلیکیشنی برای جا نماندن از اتوبوس و مترو
این خودرو خندان خودران را ببینید+تصاویر
فورد خودروهای خودرانش را از سال 2025 می فروشد
دوستی خودروها با هم
رقابت تاکسیهای بدون راننده کلید خورد
آیا شیشه های بنز و ب ام و جلوی ابتلا به سرطان را می گیرند؟
تردد اولین اتوبوس بدون راننده جهان در لیون فرانسه
تست مینی بوس خودران در دبی+تصاویر
جاده های چین مجهز به اتومبیلهای خودروان با پلتفورم ویژه
اتحاد آمریکا و چین برای ساخت خودرو خودران
ساخت اولین تراکتور هوشمند خودران
بزرگترین چالش ماشین های خودران
پیشبینی فروش خودرو در جهان
تردد خودروهای بدون راننده در میشیگان قانونی میشود
راه اندازی خدمات تاکسیهای خودران در 10 شهر جهان
آزمایش نخستین تاکسی بدون راننده در سنگاپور
ساخت سریعترین خودروی تولید انبوه
ساخت اولین خودروی مسابقهای خودران+تصاویر
گزارش تصویری از گرانترین نمایشگاه خودرو جهان
تبی که دنیای خودرو را تکان داد
همکاری ولوو و اوبر برای توسعه و آزمایش خودروهای خودران
سوپراسپورت جدیدی ازطراح فراری و مازراتی +عکس
10 خودرو درجه یک برای سفر کدامند؟
آمادهسازی ایستگاه فضایی بینالمللی برای ورود تاکسیهای فضایی
رونمایی از اولین سیستم صوتی هوشمند سونی برای خودرو سازگار با اندروید و آیاواس
باتری با قدرت شارژ دو برابر در راه است
تزئین خودرو با گل در هلند + عکس
تصاویر جدیدترین خودرو سوپر اسپورت
برنامه جهانی برای کاهش تولید خودرو
استثناییترین خودروهای کلاسیک جهان در یک گزارش تصویری
هیوندای و گوگل همکار میشوند
فورد خودروی خودران اشتراکی طراحی میکند
اتومبیل خودران باز هم حادثه آفرید
2 جواهر گرانقیمت بوگاتی به شاهزاده میلیاردر سعودی رسیدند
ساخت نانوپوششهای ضد حریق با کاربرد در صنایع هوافضا و خودروسازی
حمل و نقل عمومی سنگاپور به خودروهای خودران سپرده میشود
مرسدس-بنز تبلیغات کلاس E را متوقف کرد
روبات خودروسازی با خطای کمتر از 100 میکرومتر
آلمان و چین سخت گیری های جدیدی برای «خودران» ها وضع کردند
خودرو خودران قاتل به روزرسانی شد
تست و آزمایش مجازی خودروهای خودران آنها را برای عبور از جادههای حقیقی امنتر میکند
اتوپایلوت تسلا مدل X شاکی دیگری پیدا کرد
مذاکرات دو خودرو ساز بخش خصوصی با ایتالیا، کره و آلمان
چند دقیقه داخل مدل جدید شاسی بلند MVM
ضرر 9 میلیارد دلاری خودروسازان جهان از خروج بریتانیا
سوئیسیها استفاده از اتوبوسهای خودران را کلید زدند
واکنش خودروسازان جهانی به جدایی انگلیس از اتحادیه اروپا
ساخت استادیوم با الهام از خودروهای کروک
ورود چین به عرصه خودروهای خودران
مشتریان ما سواری خودران را با دیگر خودروهایشان داشته باشند
ساخت مینی بوس برقی خودران با استفاده از چاپگر سه بعدی
تاسیس آموزشگاه رانندگی مجازی برای خودروهای خودران!
آیا "آتیوا" رقیب تسلا می شود؟
نزدیک شدن به دوره خودروهای بدون راننده
گوگل رویای خودروهای پرنده را در سر دارد
آمریکا مقررات راهنمایی خودروهای خودران را اعلام می کند
اینفینیتی تمام خودروهایش را خودران میکند
ب ام و فن آوری خودران به خانواده "i" میبرد
خودرو خودران گوگل روز به روز مودب تر میشود!
اتومبیل خودران گوگل بوق زدن یاد گرفت
جذب معمار معروف خودروسازان آلمانی در اپل
اولین خودرو کاملا خودران ولوو تا 4 سال دیگر میآید
لهستان در صنعت خودرو ایران سرمایه گذاری می کند
آیفون را فراموش کنید، خودرو پولسازترین محصول اپل خواهد شد
گوگل فن آوری خودران را علنی می کند
اتفاقات شرکت خودروسازی فولکس مصداق توجه به کیفیت است
FNR، شبح جدید جنرال موتورز
آکورا فن آوری خودران ارائه می کند
فناوری رانندگی خودکار به کامیونها میرسد
اتومبیل خودران به ایستگاه «گرین ویچ» رسید
استفاده از تفاله قهوه به جای آسفالت
هشدار به بیمه گران: نگران اتومبیل های بدون سرنشین باشید
چرا نیسان میتسوبیشی را خرید؟
فروش 20 میلیون دستگاه خودرو تا 2018
سفر جادویی با سرعت 1000 کیلومتر بر ساعت!
روز حسابرسی
تحلیل اکونومیست از جنجال تقلب خودروسازان
راهاندازی سیستم تحویل کالا به خودرو بدون نیاز به حضور راننده
10 میلیون خودرو خودران در جهان تا سال 2020 در جادهها
سیاهچالهای به نام «نیروی کار مازاد»
ولخرجی کار دست ب.ام.و داد
100 مینی ون خودران تولید می شود
شراکت گوگل و فیات کرایسلر برای ساخت خودروی خودران
گران ترین خودروهای موجود بازار جهان
آلفابت الفبای فن آوری خودران را به فیات می آموزد
همکاری گوگل، فورد و اوبر برای ساخت خودروهای خودران
خودروهای بدون راننده به دوبی میآیند
رقابت تنگاتنگ خودروهای خودران در دو سوی دنیا
خودرو بدون راننده با بهرهگیری از کینکت
آزمایش موفق اتومبیل خودران چینی در مسیر 1900 کیلومتری
نمایشگاه خودرویی پکن میزبان کدام خودروها است؟
وقتی یک مادربزرگ 70 ساله سوار خودروی خودران تسلا میشود
ولوو به دنبال پروژه خودروهای خودران در آمریکا است
ماشینهای خودران به «فرشته محافظ» مجهز میشوند
ولوو به دنبال تست خودروهای خودران در چین است
درخواست جدید علیه ورود خودروهای خودران به جادهها
خودروهای هوشمند و خودران چگونه هدایت میشوند!؟
بازگشت پژو سیتروئن به آمریکا
خودروهای برقی به صورت وایرلس شارژ میشوند
توسعه یک آلیاژ سبک و کم هزینه برای بهبود مصرف سوخت خودرو
ساخت اولین اتومبیل مسابقهای خودران
تویوتا و مایکروسافت شریک شدند
الزامی شدن یک فناوری جدید در خودروهای اتحادیه اروپا
ارزان شدن خودروهای برقی باعث سقوط بازار نفت میشود
آیا تاپ گی یر بدون کلارکسون موفق می شود؟
ساخت نسل جدیدی از چراغ قوه به قدرت چراغ خودرو
درخواست خودروسازان برای ایجاد خط سریع برای خودروهای خودران
بازگشت لینکن با شگفتی تازه
آیا این می تواند آینده باشد؟
خودروهای پارسال،آینده سازان امسال به روایت تصویر
چینی ها هم اتومبیل بدون سرنشین می سازند
کلاسیکهای مدرن
پلتفرم تعاملی جدید آلمانها برای ماشینهای پلیس در نمایشگاهCeBIT 2016
ب ام و روی فن آوری خودران و الکتریکی متمرکز می شود
امکان استفاده داعش از خودروهای خودران به عنوان بمبگذار انتحاری
صنعت خودرو در قرن آینده با چه تغییراتی رو به رو خواهد بود؟
عرضه نسخه اولیه جویشگر نقشه در نیمه اول 95
خودروهای عجیب در جزیره ای از آمریکا
فن آوری خودران برای جنرال موتورز 1 میلیارد دلار آب خورد
آئودی میزبان مسابقات خودروهای خودران ماکت
ابداع فناوری جدید برای تبدیل خودروها به سالن نمایش فیلم سینمایی
تویوتا پوشیدنی جدیدی برای جابجایی نابینایان می سازد
آسیب خطوط تولید خودروسازان درپی تشدید بحران پناهجویان
اولین خودرو بدون پنجره
ب ام و 100 سال آینده صنعت خودرو را پیش بینی کرد
جنسیس اولین خودرو تست فن آوری خودران هیوندای شد
فناوری بیسیم، ارتباط خودروها و جذب انرژی خورشید از بدنه
تجهیز 90 درصد خودروها به اینترنت
دعوت خودروسازان برای شراکت در خدمات نقشه
یک فراری برای چهار نفر+تصاویر
چین با خودروهای سیار آزمایشگاهی به جنگ ایدز رفت
افت 9.9 درصدی تولید خودرو ایران
رونق بازار خودرو به لطف بنزین ارزان
لامبورگینی به روایت تصویر
ملاقات سران خودروسازی زیر ابری از دود
مذاکرات ادغام فیات کرایسلر و پژو سیتروئن تکذیب شد
نمایشگاهی برای عاشقان سرعت و تکنولوژی در ژنو
خودرو خودران گوگل تصادف کرد
توقف امکانات خودروی هوشمند نیسان برای جلوگیری از نفوذ هکرها
اوبر هم بدنبال ساخت خودروهای خودران است
تجهیز خودروها به فناوری «تلماتیک»
ولوو V90 سرانجام رسما رونمایی شد+تصاویر
رقابت بیشتر برای ساخت خودروهای خودران
فیات، اولین وانت خود را روانه بازار کرد
شناسایی فوری عابران پیاده توسط خودروهای خودران با الگوریتم جدید
فناوری پیشرفته تشخیص عابر ویژه اتومبیلهای خودران
خبرسازترین رویدادهای صنعت خودرو در 2016
صنعت خودرو در جهان
طراحی آینههای هوشمند نمایش دهنده ترافیک، اخبار و آب و هوا
برای نخستین بار خودروهای «SUV» ، محبوبترین در اروپا شدند
حراج مرسدس 540K با قیمتی باور نکردنی
اخراج صدها کارمند اروپایی فورد آمریکا
وقتی هابلوت و فراری ساعت می سازند
معرفی برابوس مرسدس بنز C 450 AMG اسپرت
حمایت انگلستان از خودروهای سبز
چشمانداز منفی بازار جهانی فروش خودرو
ردیابی انتقال فناوری در قراردادهای خودرویی
خودروهای خودران در خیابانهای عادی انگلیس تست میشوند
شاسی کوتاهترین خودرو جهان را ببینید
جنرال موتورز تیم طراحی خودروهای خودران تشکیل داد
در این جاده دیگر لیز نمی خورید
بهترین خودروهای شاسی بلند کامپکت سال 2015
خودرو چند بعدی در ژاپن
گرانترین مینیماشینهای جهان کداماند؟
حرکت موتورسیکلت های کاربراتوری به سمت تکنولوژی انژکتوری
چطور آفلاین از نقشه گوگل استفاده کنید؟
ساخت موتورسیکلت با قابلیت تبدیل به جت اسکی
خداحافظی با آینه خودروها
تولید آئودی کیو3 در مجارستان
راه طولانی و سخت خودروهای خودران
گرانترین آپشنهای خودروهای لوکس+تصاویر
کدام خودروسازان معتبر جهان به ایران میآیند؟
استفاده همزمان اطلاعات و سرگرمی در خودرو
ب ام و سری 7 به طور خودکار در آمریکا پارک میکند
فراری برندگان مسابقه طراحی خود را اعلام کرد
همکاری خودروسازان برای جلوگیری از هک شدن اتومبیلهای هوشمند
سرمایه گذاری 4 میلیارد دلاری آمریکا برای ساخت خودروهای خودران
هراس بیمهگران از فراگیر شدن فناوری خودرانها
اوباما درباره خودروهای خودران صحبت میکند
اوباما تکلیف خودروهای خودران را روشن میکند
ورود خودروییها به بازار ICT
فناوری احضار خودرو بدون راننده از شهری به شهر دیگر
تحقیق و توسعه، حلقه مفقوده خودروسازی ایران
زنجیر چرخ لاستیکی در مرکز رشد دانشگاه آزاد همدان رونمایی شد
لذت رانندگی در حالت بی وزنی
10 خودرویی که در دیترویت نگاهها را خیره خواهند کرد
خودروهایی با قلب کوچک اما قدرتی فوق العاده
افزایش خودروهای خودران آزمایشی فورد
همکاری جنرال موتورز و لیفت برای ایجاد تاکسی های خودران
خودروهایی که از 2016 توقف تولید میشوند
ایران کجای صنعت خودروسازی جهان ایستاده است؟
اتصال خودرو و گوشی هوشمند با نمایشگر «وینت»
نمونه جدید خودروهای خودران عرضه شد
آمار سرقت روزانه خودرو در فرانسه
خودرانها قابل اعتماد هستند؟
فراخوان خودروهای فراری و فورد برای نشت سوخت
این خودرو واقعا خودران است
اتومبیلی جدید به شکل میز پیکنیک
فیلترهای نانویی خودرو با قابلیت بهبود عملکرد موتور
13 خودرویی که خیلی گرانتر از قیمتشان به نظر میرسند
مشتریان، تعیینکننده برنده رقابت خودروهای برخط
یک سوپروانت با موتور کوروت
فناوریهای خاص در خودروهای فردا
گوگل و فورد باهم خودروی خودران میسازند
ایمن ترین خودروهای 2016
افزایش تعداد مراجعان به اینترنت هنگام رانندگی با خودرو
12 تکنولوژی شگفت انگیز در خودروها
یک ماهه خودرو بدون سرنشین بهتر از تسلا ساختم
شهر خودروهای خودران ساخته می شود
رونمایی از نخستین خودرو کنترل ذهنی در چین
این خودرو از دوزخ آمده!
غول های خودرو را ببینید و بشناسید
پیشرفت غول اینترنتی چین در تست خودروی خودران
سهمیه ثابت برزیل در میان 10 خودروساز برتر جهان
صنعت خودرو جهان در سال 2016
خودرویی که با مغز کار می کند
تمایل تولیدکنندگان تراشههای الکترونیکی را به سوی خودروسازان
بهترین و بدترین برندهای خودرویی سال
وقتی شیشههای جلوی اتومبیل هوشمند میشود
فروش نقشه نوکیا به خودروسازان آلمانی نهایی شد
ابداع فناوری جدید برای برقراری ارتباط میان خودروهای هوشمند و عابران پیاده
سرعت خود را در هنگام حرکت بسنجید
استفاده از نانو ابرخازن در خودروهای بدون سرنشین
کلارکسون و یارانش سوار بر ماشینهایی خاص
دوست داشتنی ترین خودروهای نمایشگاه خودرو گوانجو
54 اشتباه تاریخی خودروسازی دنیا را ببینید
ناتالیا؛ گرانترین خودرو تولیدی جهان
نسل جدید چراغهای هوشمند خودرو
خواب راحت در حین رانندگی با نسل جدید خودرو خودران
خودرو، محور مذاکرات آمریکا و اتحادیه اروپا
10خودرویی که مردان بیشتر می پسندند
قزاقستان هم برای خروج صنعت خودروسازی این کشور از رکود به سراغ وام خودرو رفت
روشن کردن خودرو با موبایل
خودروسازی فرانسه در سـوگ
بزرگترین پیمان جهانی حذف تعرفه خودرو
-
این ماشین خیابانها را سنگفرش میکند
خودرو بدون راننده گوگل به علت سرعت کم جریمه شد
ساخت جتپک سبک با کارایی بهتر
نمایش خودروهای خاص در دبی
آپشن تثبیت سرعت خودرو در مسیرهای طولانی ساخته شد
تمام خودروهای مامور 007
صندلی خودرویی که نوار قلب میگیرد
تست اولین خودرو خودران در استرالیا
شوفر رباتی هم به بازار آمد
تولید اتومبیل 53 هزار دلاری با استفاده از چاپگر سه بعدی
روباتی که رقیب پیکهای موتوری میشود
رونمایی از باتریهای پرقدرت جدید برای خودروهای برقی
مطمئنترین برندهای خودروسازی جهان
تاکسیهای پرنده؛ رویایی که به واقعیت تبدیل میشود
امکان ردیابی خودرو به صورت آنلاین
استفاده از فرامین صوتی در خودرو موجب حواس پرتی رانندگان می شود
ایمنی خودرو قربانی ارزانی
عجیب وغریب ترین ماشین های دنیا
تصویر یک ماشین قدیمی که قایق می شد
احتمال جریمه 100 هزار دلاری هکرها
خودرو خورشیدی غزال ایرانی مجوز ورود به مسابقات جهانی گرفت
ماشین سواری سرخپوستها؛ 110 سال قبل
ده خودرویی که فقط سریع به نظر میرسند
کاش این 7 خودرو هرگز تولید نمیشد!
این خودرو باند فرود پهپاد دارد
صدای بوق خودروهای ناپدید شونده میآید!
تولید چتر تغییر شکل دهنده با الهام از سیستم تعلیق خودرو
نیسانی که سلفی میگیرد
پیدا کردن جای خالی پارک خودرو به کمک اینترنت
رسوایی کیفیت پیشرفتهترین خودروهای جهان
ساخت سیستم هشداردهنده انحراف از مسیر به سایر رانندگان
کنترل خودرو با ساعت هوشمند
رشد 13.9 درصدی تولید خودرو در ایران
راه اندازی اولین کارواش خودرو همراه با فن آوری نانو در کنگاور
زیباترین خودرو های قرن 21 را ببینید
فعالیت جدید بیامو در تولید خودروهای بدون راننده
ابتکار عمل اینتل برای مقابله با هک کردن خودروها
کدام کشورها دنبال خودروسازی رفتند؟
خودرو عنکبوتی که از شیب 70 درصد هم بالا میرود
لیزر میتواند خودروهای هوشمند را از کار بیندازد
صنعت خودرو برزیل در بحران
ناسا به دنبال ساخت پرتوی کششی با فناوری خودرو فراصوت
رونمایی از نخستین خودرو فراصوت جهان
رشد 9 درصدی تولید خودرو در جهان
خودرویی که تغییر شکل میدهد
نانوژنراتوری برای تولید انرژی از اصطکاک لاستیک خودرو
سامسونگ برترین شرکت فناوری در زمینه پتنت خودرو
گرانقیمتترین خودروهای جهان را ببینید
استخدام دو هکر خودرو در شرکت تاکسی یاب اوبر
تبدیل خودرو عادی به خودرو هوشمند با اکسپلوراید
بی علاقگی رانندگان به استفاده از امکانات فناوری خودروها
پیادهروی پرهیجان با کفشهای بالهدار اسکیت
کلاهی که ضربه وارده به سر را شناسایی میکند
ربات حمل و نقل قطعات برای کاربری در صنایع مختلف طراحی شد
سلول های خورشیدی با کاربرد در صنعت خودرو ساخته شد
سریعترین خودرو مسابقاتی خورشیدی
ساخت خودرو رکابی مجهز به پوسته محافظ کاربر
مایکروسافت با این نرمافزار اخبار را حین رانندگی برایتان میخواند
نخستین خودرو کیفی جهان طراحی شد
اعتصاب کارگران خودروسازی در برزیل
واک کار، وسیله نقلیهای بهتر از هاوربرد لکسوس؟!
خودرویی با حجم یک کوله پشتی!
این خودرو در کیف جا می گیرد
چرا خودروسازها به نقشههای نوکیا سه میلیارد دلار پول دادند؟
خودروهایی که پس از طراحی مجدد، زشتتر شدند
7 خودرویی که از جاذبه سریعترند
استیو جابز دنیای خودرو
آژیر خطر برای بزرگان خودرو به صدا درآمد
تقاطع خطرناک در صنعت خودرو
محققان چینی برای کنترل خودرو از امواج مغزی استفاده کردند
رادیوی خودرو هکپذیر زیر ذرهبین رفت
روند تحولات مناسب برای آینده خودروهای ارتباطی
نانوتورنادو، ماشین پرنده بدون پره
ابداع فناوری «حفاظت هوشمند» برای درب خودروها
ساخت شهر 10 میلیون دلاری برای آزمایش خودروهای خودران
قرارداد تولید موتور نسل جدید همسو با محیط زیست امضا شد
هک کردن خودرو در حال حرکت خودروسازان را شوکه کرد
ساخت جادههای پلاستیکی در هلند
اولین تصادف خودروهای بدون راننده گوگل 4 مجروح بر جای گذاشت
تدابیر دولت اندونزی برای مقابله با افت فروش خودرو
رانندگی در دنیای مجازی سهبعدی با هدست فناورانه
با سیستم EYES هرچه جلو ماشین مقابل هست را ببینید!
تولید خودرو با فناوری چاپ سه بعدی در کارخانه های فشرده
تهیه آب آشامیدنی سالم با استفاده از نمک و باتری خودرو
امکان اتصال پرداخت الکترونیکی به خودرو فراهم شد
جادوگران طراح تاریخ صنعت خودرو
ساخت فرمان هوشمند برای تشخیص خواب آلودگی راننده
نامزدهای خودرو سال اروپا
کاهش آلودگی صوتی و تولید انرژی پاک با موانع رنگی
تولید شورولتهای جدید با سیستم خنککننده موبایل
تولید انرژی خورشیدی با موانع صوتی بزرگراهها
شاسی بلندها پیشران رشد صنعت خودرو
تجهیز خودروها به دوربین دید در شب!
کمک خودروسازان ژاپنی به ساخت جایگاههای سوخت
فیلیپین میخواهدهاب خودرو شود
برترین برندهای صنعت خودرو 2015
نانو ژنراتوری که اصطکاک چرخش لاستیک های خودرو را به انرژی تبدیل می کند
موفقیت فناوران کشور در ساخت دستگاه کاهش آلایندگی موتورهای بنزینی
ساخت نخستین خودرو پرسرعت با چاپگر سه بعدی
اتومبیل فوق حفاظت، قدرت یا ترس!
10 فناوری نوآورانه در جدیدترین خودروها
ساخت هشدار دهنده خستگی و حواس پرتی برای رانندگان در دانشگاه تبریز
با ویلچر از پله ها بالا بروید
گوشی های هوشمند بلای جان رانندگان
سیستمهای خواب به خواب نرفتن در جاده
روغن خوراکی به سوخت پاک تبدیل میشود
تامین نیروی خودرو با انرژی بخار آب و هاگ
چالش بیمه با خودروهای بدون راننده
فناوری جالب برای کامیون ها
با این وسیله جالب و شگفتانگیز برای یافتن خودرو پارک شده اذیت نمی شوید
تجهیز 77 میلیون خودرو به سیستمهای گوگل و اپل
خودرو را با تلفن همراه هدایت کنید
چاله های خیابانی دیگر دردسر رانندگان نخواهند بود
احساسی شبیه لامبورگینی
نصب سیستم جلوگیری از برخورد در خودروهای سبک
ساخت حسگری برای توقف خودرو رانندگان مست
راه حل تازه فناوری اطلاعات برای یافتن جای پارک خودرو
طراحی نسل جدید ساعت مچی با الگوبرداری از خودروهای اسپرت
جلوگیری از رانندگی در زمان مستی با حسگر جدید
استفاده از فناوری هوشمند آندروید اوتو در خودروها برای نخستین بار
اطلاعات حمل و نقل عمومی شهرها به نقشههای آیفون اضافه میشود
نقشههای اپل بهروز میشود
خودروهای تاشو در راهند
پیشنهاد سه میلیاردی «ابر» برای خرید خدمات نقشه نوکیا
برنامههای نرمافزاری کنترل خودرو برای فراموشکاران و والدین نگران
باز کردن قفل خودرو با ساعت اپل ممکن شد
پدال هوشمندی که به تعیقب سارقان میرود
سامانه هشدار زودهنگام خواب آلودگی راننده ساخته شد
پرقدرتترین و کوچکترین بولدوزر جهان
تولید سوخت از آب و دی اکسید کربن
تاکسی که در آسمان پرواز میکند
انقلاب فناوری در بزرگترین بازار خودرو جهان
فناوری خودرو وارد یخچال سوپرمارکتها شد
سیستم مسدود کننده تلفن همراه در داخل خودرو طراحی شد
دستبند مایکروسافت با امکانات ویژه برای دوچرخهسواران
ابداع فناوری ارتباطی خودرو توسط اچتیسی
بهترین سدانهای متوسط سال 2015 را ببینید
رونمایی از عینک شگفتانگیز BMW
ابداع فناوری جدیدی که حرکات اشتباه راننده را هشدار می دهد
تاثیر رونمایی از مدلهای جدید بر قیمت مدلهای قدیمی
ساخت و طراحی سیستم تخلیه آب موتور و رادیاتور
خودروسازان در روابط خود با تونس تجدیدنظر میکنند


Controversial Vehicle Price Surge in Iran
IKCO management handed over to consortium of non-governmental shareholders
Iran's government approved car import after four years
$2 Billion Aid Package to Bolster Automotive Industry
Renault sales decline 6.7% in first half of 2019
FIAT cars will be manufactured in Salafchegan, Iran
Car, mobile price fluctuations in Iran puzzling people
IKCO, Azad University Sign R&D Agreement
When will Azerbaijan start producing Peugeot 207?
Iran Annual Auto Output Report: 2018-19
Automotive Industry has exceeded the targets with “Automechanika Istanbul” which the World's 3rd Largest Fair!
Sout Korea’s auto exports down 1.6% in Feb.
Renault to Return to Iran: Deputy Minister
Chery's luxury brand will soon be on the market
Warm start for arrizo6 in Ahwaz


