


- Monday 30 November 2015 - 19:52:00
جامع اما ساده با سیستم مالتیپلکس در خودروهای امروزی
این سادهساز پیچیده...
عصر خودرو: برای دهههای متمادی، خودرو بخشی از زندگی انسانها بوده و مانند هر مصنوع دیگری در طول حیات خود تحولات زیادی را تجربه کرده است. خودرو را باید از آن دست ساختههای بشر دانست که با ظهور خود، نوآوریهای زیادی را در زمینههای مختلف ایجاد کرده است که با توجه به علوم و تکنولوژیهای مختلفی که برای طراحی و ساخت آن به کار میرود، جای تعجب ندارد. با پیشرفت علوم مهندسی و تکنولوژی، خودروها نیز پیشرفتهتر و پیچیدهتر شدند. با ظهور عصر الکترونیک و نفوذ آن به هر جنبه از زندگی آدمی، خودروها نیز از این پدیده در امان نماندند و خودروسازان برای بهبود عملکرد و آسایش خودرو و تجهیزات آن، سیستمهای الکترونیکی مختلف را در خودروها به کار گرفتند.
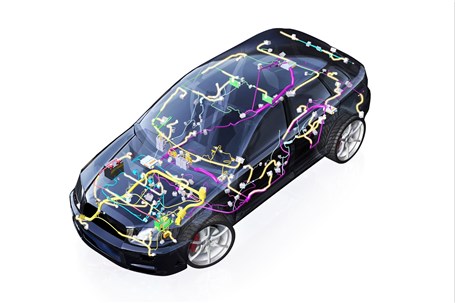
به گزارش پایگاه خبری «عصر خودرو»، با پیشرفت صنعت الکترونیک کار به جایی رسید که اگر در دهه 50 میلادی، پیشرفتهترین قطعه الکترونیکی یک خودرو رادیو لامپی بود، حال یک خودرو معمولی به چندین کیلومتر رشته سیم و دهها مدار کنترلی و سنسورهای مختلف مجهز شده است.
این حجم از اتصالات و مدارات الکترونیکی باعث شد که فرآیند طراحی، تولید، مونتاژ، عیبیابی و تعمیر و نگهداری خودروها بسیار دشوارتر و پیچیدهتر از قبل شود. با ظهور میکروکامپیوترها و ECU در خودرو و نیاز به اتصالات مختلف، این مسئله ابعاد جدیدتری نیز به خود گرفت.
ایده به کارگیری تکنولوژی مالتیپلکس
(Multiplex) را باید یکی از بهترین راهحلهای ممکن برای این مسئله دانست.
مالتی پلکسینگ (Multiplexing) موجب شد تا امکان برقراری ارتباطات مختلف و پیچیده با رشته سیمهای محدود برقرار شود و تمامی واحدهای کنترلی در قالب یک شبکه انتقال داده قرار بگیرند و بدین ترتیب ضمن کاهش حجم سیمکشی به میزان قابل توجه، قابلیتهای نوینی برای مجموعه فراهم شود که پیش از این تنها با کیلومترها سیمکشی در خودرو قابل دسترسی بود.
مالتیپلکس چیست؟
اصولا مالتیپلکسکردن بسته به نوع کاربرد، مفاهیم مختلفی دارد اما به صورت کلی مالتیپلکس کردن در مدارات الکترونیکی یعنی انتقال چندین سیگنال مختلف از یک یا چند رشته سیم مشترک و محدود. به زبان ساده با مالتیپلکس کردن میتوانیم با استفاده از یک خط مشترک، چندین سیگنال مختلف را به مقصد برسانیم بدون اینکه نیازی به رشته سیم مستقل برای هر سیگنال یا به عبارت بهتر ارتباط نقطه به نقطه وجود داشته باشد. در نتیجه مدارات ما به میزان قابل توجهی سادهتر و کمحجمتر میشود. با استفاده از مداری به اسم مالتیپلکسر (جمعکننده سیگنال) و دیمالتیپلکسر (تفکیککننده مجدد سیگنال) امکان ارسال چند پیغام در خط مشترک فراهم میشود. خط انتقال مورد نظر میتواند انواع مختلفی داشته باشد؛ از سیمهای تکرشته ساده گرفته تا اتصالات چاپی، خطوط تلفن، سیمهای کواکسیال، ارتباط رادیویی و مادون قرمز و حتی ارتباط ماهوارهای. تکنولوژی مالتیپلکس را باید یکی از فراگیرترین تکنولوژیهای امروزی دانست که تقریبا در اکثر وسایل الکترونیکی امروزی کاربرد دارد، از طراحی تراشههای الکترونیکی و مدارات مجتمع گرفته تا ساعتهای دیجیتال، کامپیوترها، انواع گجتهای هوشمند و حتی خطوط تلفن و انواع شبکههای کامپیوتری نظیر شبکه جهانی اینترنت میتوان مفهوم مالتیپلکسینگ را مشاهده کرد.
مالتیپلکسینگ در خودرو
همانطور که در ابتدا اشاره کردیم، افزایش حجم دسته سیمها و اتصالات به کار رفته در خودروها به علت افزایش سیستمهای کنترلی مختلف و وسایل مصرفکننده، موجب پیچیدگی و ناکارآمدی سیستمهای الکترونیکی خودروها و دشواری فرآیند طراحی، ساخت و مونتاژ و عیبیابی آن شد.
روشهای متعددی برای کاهش حجم دسته سیمها به کار گرفته شد مانند طراحی ماژول کنترل بدنه و گردآوری تمام سیستمهای کنترلی پراکنده در قالب یک ECU مرکزی و طراحی سیستم درگاه OBD جهت عیبیابی یونیتهای مختلف سیستم.
اما باید مالتی پلکسینگ را کارآمدترین روش ممکن دانست که ضمن کاهش قابل توجه اتصالات، موجب افزایش پویایی و کارآمدی سیستم میشود. در این روش، خودرو منطقهبندی شده و برای هر منطقه و سیستم، یک واحد کنترل (ECU یا گره) در نظر گرفته میشود که کنترل آن مجموعه را بر عهده دارد. با متصلکردن تمامی این واحدهای کنترل از طریق دو رشته سیم میتوان این امکان را فراهم آورد که تمامی این یونیتها در قالب یک شبکه با آرایش و پروتکل مشخص، اقدام به تبادل داده کنند.
در نتیجه دیگر نیازی به بهرهگیری از صدها رشته سیم مختلف جهت برقراری ارتباط نقطه به نقطه مابین یونیتها برای انتقال دستورات و اطلاعات کلیدها و سنسورها نیست و تمامی اطلاعات مورد نیاز در داخل شبکه و توسط تنها دو خط ارتباطی جریان مییابد. عموما در خودروهای مالتیپلکس، ماژول کنترل بدنه یا BCM به عنوان مدیر و سرور شبکه در نظر گرفته میشود. در اکثر خودروها با توجه به منطقهبندی خودرو و تنوع زیاد واحدهای کنترلی، از چند شبکه مالتیپلکس با آرایش و پروتکل متفاوت استفاده میشود که تمامی آنها به صورت مشترک به BCM متصل میشوند و BCM به عنوان یک درگاه یا مترجم مابین این شبکهها عمل کرده و به صورت همزمان تمامی آنها را مدیریت میکند.
شبکههای مالتیپلکس از نظر نوع آرایش و پروتکل به کار رفته در آنها بسیار متنوع هستند اما آرایش BUS با پروتکل CAN ا(Car Area Network) پرکاربردترین و موفقترین نوع شبکه مالتی پلکس است که امروزه در اکثر تولیدات خودروسازان حضور دارد.
با توجه به تنوع زیاد شبکهها از نظر نوع آرایش و ساختار و پروتکل به کار رفته (که خود نیازمند یک نوشتار جداگانه است) و محبوبیت زیاد شبکه CAN، در این نوشتار تنها به بررسی شبکه CAN میپردازیم.
لازم به ذکر است که پایه و اساس مکانیسم سایر شبکههای مالتیپلکس نیز چندان با شبکه CAN متفاوت نیست.
شبکه CAN:
اساس کار شبکه CAN بر مبنای ارسال پیغام در شبکه به شیوه انتشاری (Broadcast) بدون هیچگونه آدرسدهی مشخص است. در این شبکه هر ECU یا گره به وسیله یک کنترلر شبکه (مالتیپلکسر) به شبکه متصل شده و آرایش اتصال نیز به صورت BUS است؛ یعنی ECUها به صورت جداگانه به خطوط گذرگاه متصل شدهاند. هر ECU در شبکه دارای یک سری پایه ورودی یا
Input و خروجی یا output است که از طریق آن به خطوط BUS متصل شده است. هنگامی که یک گره یا ECU میخواهد پیغامی را در شبکه ارسال کند، محتوای مورد نظر خود را (که میتواند شامل اطلاعات یک سنسور یا فعالشدن یک کلید باشد) تحویل کنترلکننده شبکه خود میدهد. کنترلکننده شبکه یا مدار مالتیپلکسر شامل یک مدار تولیدکننده فرکانس، یک مجموعه کنترلکننده پروتکل و یک مدار ترانسیور (فرستنده و گیرنده) است.
پیغام مورد نظر ECU که قرار است در شبکه ارسال شود، توسط پردازنده خود ECU تولید شده و به کنترلکننده پروتکل (در اینجا کنترلکننده CAN) میرسد. کنترلکننده پیغام دریافتی را روی یک فریم اطلاعاتی منطبق بر استاندارد CAN قرار داده و با توجه به مفهوم و درجه اهمیت پیغام، آن را شناسهگذاری (برچسبگذاری) میکند و تحویل تراشه ترانسیور میدهد. در فریم اطلاعاتی تولیدشده استانداردهای زیادی جهت جلوگیری از تداخل اطلاعات، شناسه مفهوم و اولویت پیغام به صورت کدهای باینری (دستگاه اعداد مبنای 2) و هگزادسیمال (دستگاه اعداد مبنای 16) تعریف میشود. نهایتا پیغام تولید شده به شیوه دیفرانسیلی (تفاضلی) در خطوط شبکه ارسال میشود. علت این شیوه ارسال، کاهش اثرات نویز در خطوط است چون در حالت دیفرانسیلی، خود سیگنالهای پیغام و معکوس آن در دو خط شبکه به جریان درآمده و میدانهای مغناطیسی تولیدشده را خنثی میکند.
همچنین در صورت بروز قطعی در یکی از خطوط، ارتباط از دست نمیرود. همانطور که در ابتدا گفتیم در شبکه CAN آدرسدهی خاصی وجود ندارد بنابراین هنگامی که پیغامی توسط ترانسیور یک ECU ارسال میشود، تمامی ECUهای متصل به شبکه به طور همزمان پیغام را مشاهده میکنند، یعنی پیغام انتشار یافته یا
Broadcast شده است. اما از آنجایی که محتوای پیغام برچسبگذاری شده، تنها ECUهایی اقدام به دریافت و خوانش پیغام میکنند که متوجه شوند اطلاعات پیغام مورد نظر به آنها مربوط است.
سایر ECUها که نیازی به پیغام صادرشده ندارند، صرفا ناظر شبکه هستند تا زمانی که پیغام مربوط به آنها صادر شود و یا خودشان بخواهند پیغامی را صادر کنند. هنگامی که ECU صرفا ناظر است و نیازی به تحلیل و پردازش اطلاعات دریافتی ندارد، به صورت Input/output عمل کرده و محتوای دریافتی را نادیده گرفته و مجددا تحویل شبکه میدهد. مسئله شناسهگذاری پیغام در روش انتشاری اهمیت بسیار بالایی دارد چرا که بدین صورت هنگامی که ECU سیستم سوخترسانی اطلاعات سرعت خودرو را در شبکه ارسال میکند، به عنوان مثال ECU سیستم تهویه متوجه میشود که نیازی به این اطلاعات ندارد و تنها اطلاعات مورد نظر برای یونیتی نظیر یونیت صفحه کیلومترشمار لازم است.
یکی از مشکلاتی که در شبکههای انتشاری وجود دارد مسئله داوری حق تقدم ارسال پیغام است. در یک شبکه انتشاری نظیر شبکه CAN، تمامی ECUها مستر هستند یعنی قادر به تولید فریم اطلاعاتی و ارسال و دریافت پیغام هستند. هنگامی که یک ECU میخواهد پیغامی را در شبکه ارسال کند، مشکل خاصی وجود ندارد اما مشکل داوری و حق تقدم هنگامی ایجاد میشود که چند ECU به طور همزمان قصد اشغال BUS و مخابره پیغام را داشته باشند.
برای حل این مشکل، از فرایند دستیابی چندگانه به مسیر استفاده میشود. هر ECU که بخواهد پیغامی را مخابره کند، ابتدا صبر میکند که شبکه ساکت شود و بعد از آنکه کنترلکننده شبکه آن ECU اختیار BUS را به دست گرفت، با ارسال یک بیت به مفهوم آغاز پیغام، شروع به سنکرونکردن (هماهنگکردن) اطلاعات جهت شروع ارسال کرده و سایر ECUها ساکت میشوند. هنگامی که چند ECU به طور همزمان بخواهند شبکه را به دست بگیرند و بیت سنکرون برای آغاز پیغام ارسال کنند، خطای برخورد رخ میدهد. در این حالت فرآیند داوری جهت دستیابی چندگانه به شبکه انجام میشود و اجازه ارسال پیغام در ابتدا به ECUهایی داده میشود که شناسه پیغام آنها اولویت بالاتری داشته باشد. به عنوان مثال، دستور روشنشدن چراغهای جلو در اولویت پایینتری از فرمان فعالشدن فن رادیاتور قرار میگیرد و بنابراین ابتدا پیغام فن رادیاتور ارسال شده و سپس پیغام چراغ جلو ارسال میشود. البته با توجه به سرعت انتقال داده در شبکه CAN که میتواند تا مرز یک مگابیت بر ثانیه برسد، تاخیری در ارسال دستور هنگام فرایند داوری از جانب سرنشینان خودرو حس نمیشود.
یکی دیگر از قابلیتهای شبکه CAN و عموم شبکههای مالتیپلکس، قابلیت کشف خطا هنگام فعالیت و رفع آن تا حد امکان است.
به عنوان مثال، اگر مشکلی در خطوط BUS رخ داده یا یکی از آنها قطع شود، سیستم از حالت ارسال دیفرانسیلی به حالت غیردیفرانسیلی یا انتقال موازی رفته و از خطوط سالم باقیمانده استفاده میکند. در شبکه CAN با توجه به ساختار انتقال داده انتشاری، برای اینکه ECUها از اتصال به شبکه اطمینان داشته باشند هنگام دریافت پیغام، دریافت آن را تایید کرده و تاییدیه خود را به ECU فرستنده ارسال میکنند. هر پیغامی که در شبکه ارسال میشود، باید حتما مورد تایید تمامی ECUهای متصل به شبکه قرار بگیرد.
اگر یک ECU اطلاعات نامربوط و اشتباه بفرستد، در صورت کشف خطا توسط سایرین، اعلام خطا در شبکه رخ داده و درخواست ارسال مجدد صورت میگیرد. اگر چندین بار پیاپی در ارسال پیغام اشتباهی رخ دهد، ECU مسئول از شبکه به نوعی اخراج شده و دیگر اجازه دستیابی به BUS به آن داده نمیشود.
در یک جمعبندی نهایی باید گفت که استفاده از تکنولوژی مالتیپلکس با وجود پیچیدگی و گستردگی زیاد مباحث تئوری آن، موجب سادگی سختافزاری و حجم سیمکشیها و اتصالات خودروهای امروزی شده و در عین حال کارایی و هوشمندی سیستم و امکان پیادهسازی تجهیزات و امکانات جدید را افزایش داده است.
- تعمیرگاه
شتابران میزبان برادر تانک شد
تعمیرگاه مرکزی آمیکو رتبه یک را کسب کرد
صف معطلی در تعمیرگاهها کوتاه میشود؟
صف انتظار در تعمیرگاهها؛ چالش مالکان خودروهای داخلی و چینی
بازدید سرزده مدیرعامل سایپایدک از تعمیرگاه مرکزی شماره 1
تعمیرگاه مرکزی لاماری تراک رسماً فعالیت خود را آغاز کرد
پاریزان صنعت، مدرنترین آزمایشگاه کالیبراسیون تجهیزات تعمیرگاهی در کشور
نرخ تعمیرگاه های خودرو به زودی تغییر می کند
قطعات بی کیفیت و انحصار چالش صنعت خودرو
معرفی و بررسی فاکتور های مهم بهترین تعمیرگاه های تویوتا در دنده معکوس
چرا موتور خودرو میسوزد؟
تعمیر تویوتا
مراکزمعاینه فنی با تعمیرگاهها ارتباط ندارند
هزینهتراشی نمایندگیهای خدمات پس از فروش خودرو برای مردم
تعمیر خودروهای سبک صدرنشین شکایات مردمی در بخش خدمات
فناوریهای جدید برای تعمیر از راه دور خودروها
29 اشتباهی که به خودرو شما آسیب میزند
عیب یابی از روی صدای خودرو
چگونه هزینههای نگهداری از خودرو را کم کنیم؟
بازار پر التهاب قطعات خودرو و قیمت هایی که سلیقهای شدند
آیا میتوان با خودرویی که چراغ ایربگ آن روشن است، رانندگی کرد؟
5 عادت اشتباه در رانندگی که به خودروی شما آسیب میزند
تعمیر گیربکس های CVT در تعمیرگاه مرکزی مدیران خودرو
ساعت کار تعمیرگاههای خودرو تا 18 عصر
افزایش 60 درصدی تقاضای تعمیر قطعات
هزینه های تعمیر و نگهداری برقی ها نصف بنزینی ها
سوئیچ اینرسی در خودرو چیست؟
متقاضی احداث اتوسرویس 50 درصد کاهش یافت
قیمت خودرو، تعمیرکاران را هم به گرانفروشی مبتلا کرد!
یک سرویس دورهای ساده، چند؟
تعمیر رایگان 300 خودروی اورژانس و کادر درمانی توسط تعمیرکاران تهرانی
تعمیرات گیربکس را با مشاهده این عوامل جدی بگیرید +جزئیات
با این 6 کار خودرو خود را نابود میکنید +جزئیات
چرا تعمیرگاههای خودرو غیرقانونی پلمب میشود؟
نقش کمرنگ اتاق اصناف در ستاد ملی مبارزه با کرونا
تعمیرگاه های خودرو باز اما مراکز قطعات یدکی بسته باشد
علائم خرابی گیربکس خودرو چیست؟
برگزیدگان پنجمین دوره المپیاد فنی شرکت اطلس خودرو مشخص شدند
کدام خدمات آنلاین خودرو برای مردم جذاب ترند
عیبیابی کمکفنر خودرو با چند راهکار ساده
چگونه مشکل سیستم برق خودرو را برطرف کنیم؟
کاهش شدید تقاضا در بازار لوازم یدکی
فعالیت تعمیرکاران بی مجوز متوقف میشود
تعمیرگاههای مرکزی ایرانخودرو پایلوت ارائه خدمات رنگ و بدنه شدند
مراجعه مردم برای تعمیر خودرو 35 درصد کاهش یافت
فرار از هزینه سنگین تعمیرات
تعمیرگاههای شرکتها باید پروانه کسب صنفی داشته باشند
بی کیفیتی قطعات خودرو و افزایش مراجعه به تعمیرگاه
بازدید مدیرعامل سایپایدک از نحوه ارائه خدمات نوروزی در تعمیرگاه های مرکزی
توصیههای مهم برای افزایش طول عمر خودرو
تعمیرگاه مرکزی داتیس خودرو، اولین مرکز تخصصی بازسازی خودروهای کلاسیک
خودرو جایگزین جدیدترین خدمت بهمن موتور
ولوو 219 هزار خودرو را به تعمیرگاه فراخواند
نقشه عجیب شاگرد مکانیک برای فرار از پرداخت خسارت
افزایش ظرفیت پذیرش Quick Service تعمیرگاه مرکزی مدیران خودرو
تعمیر جلوبندی چقدر هزینه دارد؟
تعمیر جلوبندی چقدر هزینه دارد؟
آغاز بکار تعمیرات گیربکس در مرکز تخصصی تعمیر گیربکس های AT و CVT شرکت مدیران خودرو
روشهای موثر برای بالا بردن عمر خودرو
افتتاح تعمیرگاه مرکزی ام جی در شرق تهران
تعمیرگاهها پول خواب خودرو را به مردم بدهند
بن بست خودروهای لاکچری در تعمیرگاه!
فعالیت 5 رسته شغلی آلاینده در تهران
عیبیابی خودرو به زبان ساده؛ بررسی دلایل لرزشهای مختلف خودرو
عیب یابی خودرو به زبان ساده؛ بررسی مسائل و مشکلات آلترناتور خودرو
عیبیابی خودرو به زبان ساده؛ بررسی دلایل خرابی مکرر موتور پلهای (استپر)
الفبای دو دِف سواری
عیب یابی خودرو به زبان ساده؛ حین تعمیر خودروی تصادفی به چه نکاتی باید توجه کنیم؟
علاقه به انحراف
چرا تعمیر و نگهداری خودروهای کلاسیک و قدیمی مشکلتر است ؟
عیبیابی خودرو به زبان ساده؛ تشخیص مشکلات تغذیه الکتریکی خودرو
عیبیابی خودرو به زبان ساده؛ بررسی نشتیهای عمومی که در یک خودرو رخ میدهد
عیبیابی خودرو به زبان ساده؛ رعایت نکردن چه نکاتی به پیشرانه خودرو شما صدمه وارد میکند؟ (2)
3 روش حرفهایتر برای پیبردن به واشرسوزی سرسیلندر؛ معاینه کلینیکی
عیبیابی خودرو به زبان ساده؛ چرا پیشرانه خودرو کپ میکند؟
عیبیابی خودرو به زبان ساده؛ چرا گیربکس اتوماتیک تقه میزند؟
عیبیابی خودرو به زبان ساده؛ عیبیابی مشکلات عمومی خودرو (2)
عیبیابی خودرو به زبان ساده؛ عیبیابی مشکلات عمومی خودرو (1)
عیبیابی خودرو به زبان ساده؛ مسائل و مشکلات سیستم مکش هوای خودرو
عیبیابی خودرو به زبان ساده؛ عیبیابی سیستم برفپاککن
سرما، بازار تعمیرگاههای خودرو را داغ کرد
آتشسوزی در تعمیرگاه خودرو
تعمیرگاه مرکزی نگین خودرو در غرب تهران افتتاح شد
«مجهز و پیشرفته ترین تعمیرگاه ایران برای مشتریان رنو افتتاح می شود»
عیبیابی مجموعه ستون فرمان
ضرورت ساماندهی و برخورد با تعمیرگاههای غیر مجاز
مجهزترین و پیشرفته ترین تعمیرگاه مرکزی نگین خودرو به زودی افتتاح می شود
عیبیابی خودرو به زبان ساده؛ بازوان نالان!
راههای غیرعادی برای افزایش عمر خودرو
اگر خودرو جوش آورد چه کنیم؟
5 فناوری که تعمیرگاه ها را دگرگون خواهند کرد
راههای کاهش هزینه تعمیرات خودرو
عیبیابی خودرو به زبان ساده؛ وقتی خودرو از خواب بیدار نمیشود
چند توصیه مهم و اساسی برای افزایش طول عمر خودرو
90 درصد تعمیرگاه های موجود در شهر بدون مجوز هستند
10 راهکار بالابردن عمر خودرو
علت کشش کم موتور در خودروهای با کارکرد بالا
نرمافزار جستوجوی تعمیرگاههای پروانهدار خودرو هم آمد
عیبیابی خودرو به زبان ساده ؛ جرقههای بیجان
راهکارهای سادهای برای جلوگیری از خرابشدن خودرو؛ امدادگر خودت باش
پیشگیری بهتر از درمان!
آموزش تعمیر خودرو برای بانوان
مشکل اصلی تعمیرکاران خودرو، فناوری های قدیمی است
15 روش برای طول عمر اتومبیلهای تقویتشده
از روغنسوزی در خودرو بیشتر بدانیم
آتش به تعمیرگاه ماشین رفت
12 ترفند که باعث میشوند خودروی شما صفر کیلومتر بماند
3 نکته دانستی در مورد خودرو
صافکاری و نقاشی یک خودرو چقدر هزینه دارد؟
دینام خودرو چیست و چگونه خراب میشود؟
شورشیان پیشرانه
چگونه یک خودرو سالم داشته باشیم؟
واشر سر سیلندر خودرو چیست؟
معرفی رشته «مکانیک تراکتور و تیلر»
معرفی رشته «تعمیر خودروهای تجاری»
معرفی رشته «تعمیر موتور خودرو»
فریاد از قطعات تقلبی خودرو
چرا موتور خودرویتان در سربالایی صدای چق چق میدهد؟
دستمزد تعمیرات
تزریق حیات بخش
جراحی قلب باز در پارکینگ!
آواز ناخوشایند پیشرانه
تعمیر خودرو در دوره گارانتی رایگان است
خسارت خواب خودرو را دریافت کنید!
میزبانی نمایندگی سایپا و تعمیر رایگان خودروهای آسیب دیده در آب گرفتگی بندر دیر استان بوشهر
نگهداری پیشگیرانه از خودرو چیست؟
پیش بینی خرابی خودروها قبل از وقوع به مدد فناوری
مجتمع تعمیرگاهی اتوبوسرانی کرج در فردیس پلمپ شد
چگونه علت لرزش و تکانهای خودرو را پیدا کنیم؟
این 6 مشکل در خودرو، معمولا منجر به تشخیص اشتباه میشوند
راهکارهایی برای افزایش طول عمر خودرو
تلاش برای شفافسازی نرخ خدمات خودرویی
نگهداری زعفران گرانترین ادویه جهان در پنچرگیری+عکس
«تجربه» پیشتازتر از «علم» در تعمیر قطعات
نوک حمله انتقال قدرت
روزهای پایان استقلال
خودرو درون مغازه مکانیکی آتش گرفت
تعمیرگاه ها ملزم به ارائه زمان تحویل خودرو شدند
هزینه 200 میلیارد تومانی برای ساخت شهرک خدمات خودرویی در قم
تعمیر خودرو و تعویض قطعات رایگان شد
شریانهای جوشان
خسارت "توقف خودرو" را دریافت کنید
سیمفا عامل تراکم و معطلی در مراکز معاینه فنی
رانندگیهای پرفشـار آفت سلامتـی اتومبیلها
هُلدادن و یا کشیدن؟!
الزام به پذیرش فوری خودرو در تعمیرگاهها
تلاش ژاپنی ها برای استفاده از سهم بازار امارات در اتومکانیکای دوبی
شمارش معکوس شروع به کار چهاردهمین اتومکانیکای دوبی آغاز شد
نرخ معاینه فنی مکانیزه خودروها و موتورسیکلتها ابلاغ شد
ارائه خودرو جایگزین در صورت تاخیر در تعمیر
برای خواب خودرو پول بگیرید
پیگیری پرداخت خسارت توقف خودرو در تعمیرگاهها
گزارش تصویری غرفه داران ایرانی حاضر در دهمین نمایشکاه اتومکانیکای استانبول 2016
سرد و گرم روزگار چشیدن
پاستوریزاسیون اتومبیل!
بازار هنرنمایی روی فـلز سرد
تایر و ایرادهای رایج مربوط به آن
میلهای با قابلیت تغییر در طول
سرمـازدگی موتـور
مرور فاکتورهای حیاتی در انتخاب تایر و تاثیرات آنها
بررسی عدم کارکرد صحیح پیشرانههای دیزلی (2)
چراغ جادو
بررسی عدم کارکرد صحیح پیشرانههای دیزلی
مراجعه خودروها به تعمیرگاه ها کاهش می یابد
یک پارک دیگر در تهران تعمیرگاه خودروهای سنگین می شود؟
تب و لرز پیشـرانه
10 توصیه برای نگهداری بهتر از خودرو
90 درصد از تعمیرگاهها و اتوسرویسهای تهران در آستانه ضرر دهی هستند
ایجاد کارگروه شناسایی استعدادها و مهارتهای فنی و تعمیراتی سراسر کشور
خودروسازان جریمه میشوند
انگشت حلقهدار شاتون
سربازان ذخیره و عملیاتی ایمنی
نیمدایره ای در پازل پیشرانه
تعمیر گیربکس ماکسیما فقط با یک سوم قیمت
دودکش خودرو
طناب زندگی
رقابتی بین اینتر و افتر
نگهبان آب و دما
این گرمای مطـبوع
کوزهگری به سبک خودرو!
اعتراض شهروندان به مغازه های تعمیرات خودرو
صافکاریهای خیابانی خودرو
ترمز پارک به جای ترمزدستی
نامها و کارها
-
آیا لازم است در زمستان موتور خودرو را گرم کنیم؟
سرویس دورهای خودرو را جدی بگیرید
اجرت غیرمنصفانه در مکانیکیهای غیرمجاز
بدون انحراف تا مقصد
قفل دیفرانسیل و کاربرد آن
قلب پیشـرانه
بایدها و نبایدهای چگونگی استفاده از ضدیخ در خودروها
حمل خودروهای تحت گارانتی رایگان است
چشمهای خـودرو
خسارت خواب خودروهای مختلف چقدر است؟
آبـی بر آتش پیشـرانه
یک نسبت پرمعنا!
حیاتیترین پیـچ
مغز خـودرو چـند؟
از شـر«نویز» خلاص شوید!
جلوگیری از پرواز خودرو با دیفیوزر
نیروی روغن برای بالا بردن خودرو
روغن سردتر، کارایی بیشتر
وزن و اثـرات آن
اسـبی که از نفـس میافـتد ...
فریـاد دنـدهها
جراحی پلاستیک خودرو!
عوارض آشتی با زمین!
EBD، شیر فلکه ترمز!
کوچک اما مهـم
تکامل از نـوع دیزل
سـر پیـاز!
وقتی اتومبیل سرکشی میکند
مرثیهای برای دستهدنده
فلوتکردن و قفل گازی
وقتی اتومبیل سرکشی میکند
وقتی تسمه تایم مشکو ک به پاره شدن است
وقتی خودرو پای رفتن ندارد
وقتی خودرو نفس تنگی دارد
دکتر تغذیه پیشرانه
وقتی خودرو میل به ایستادن ندارد
لنگیدن «میللنگ»ها...!
شهرک خدمات خودرویی در قم ایجاد میشود
گیربکس اتوماتیک داخلی تا سال 96 عرضه میشود
تقابل سنت و مدرنیته
اصطکاک نجاتبخش!
.... گهی زین به پشت!
هشدار رییس اتحادیه دارندگان تعمیرگاه به مردم
جزئیات کلاهبرداریهای کلان برخی مکانیکها از خودروداران
لرزه بر انـدام فرمان
تنبلی بـاد و روغـن!
بهترین مکانیک کراچی نابیناست
مزایا و معایب استفاده از کروزکنترل
دستهای زیر پرده!
صلیب تمام فلـزی
ده چک
شُشهای اتومبیل
معاینه سرپایی برق کشی ساختمان موتور
زمانی برای آزادی و سکوت
دوقلـوی موتـوری
وقتی ترمزها ناله میکنند
بینهایت دنده...
شمع گرم یا سرد ؟!
آزمایشگاه سیالات در خودرو
راهکارهایی برای جلوگیری از جوش آوردن ماشین
دوخت و دوز موتور
وقتی فرمان نافرمانی میکند
روغن حیات
ماجرای تابستان و جوش آوردن اتومبیلها
اجرای طرح سرویس کلینیک تابستان خودرو
خودروهای لوکس نمایندگی مجاز ندارند
بانوان نخبه جذب رشته اتومکانیک میشوند
بزرگترین مرکز خدمات خودرویی در سقز افتتاح شد
نرخ تعمیر خودرو در نمایندگیها چگونه محاسبه میشود؟
کمک فنرهای مغناطیسی را بیشتر بشناسیم
با واشرهای کاغذی خشک شده چه کار کنیم؟!
جریمه 255 میلیون ریالی یک مکانیک خودرو در قزوین
آغاز ساماندهی تعمیرگاههای خودرو در پایتخت
میزان جریمه توقف خودرو در تعمیرگاه اعلام شد
کلاچ و ترمز دو پا یعنی چه؟
آفست رینگ چیست و چه مفهومی دارد؟
چرا خودرو روی ویبره میرود؟!
تعمیر خودروهای آمریکایی در ایران!
نگاهی به سه نوع رایج سیستم های کمکی فرمان
عیبیابی خودروهای دیزل
دولتها کمکی به اصناف نکرده اند


Controversial Vehicle Price Surge in Iran
IKCO management handed over to consortium of non-governmental shareholders
Iran's government approved car import after four years
$2 Billion Aid Package to Bolster Automotive Industry
Renault sales decline 6.7% in first half of 2019
FIAT cars will be manufactured in Salafchegan, Iran
Car, mobile price fluctuations in Iran puzzling people
IKCO, Azad University Sign R&D Agreement
When will Azerbaijan start producing Peugeot 207?
Iran Annual Auto Output Report: 2018-19
Automotive Industry has exceeded the targets with “Automechanika Istanbul” which the World's 3rd Largest Fair!
Sout Korea’s auto exports down 1.6% in Feb.
Renault to Return to Iran: Deputy Minister
Chery's luxury brand will soon be on the market
Warm start for arrizo6 in Ahwaz


