


- Monday 02 October 2017 - 12:17:00
نگاهی جامع به پروتکلهای خودرویی CAN و VAN؛
مخابرات خودرویی
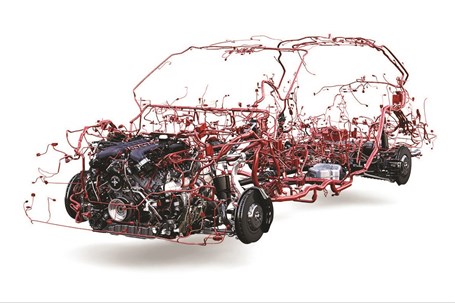
عصر خودرو- تا چند دهه پیش پیچیدهترین قطعه الکترونیکیای که در درون یک خودرو یافت میشد، رادیو پخش آن بود اما این روزها با انفجار رشد دنیای الکترونیک و کامپیوتر و نفوذ آن به هر بعدی از زندگی ما، خودروها نیز الکترونیکیتر از گذشته شده و به حجم بیشتری از سیمکشی احتیاج پیدا کردند تا جایی که برای یک خودروی معمولی به کیلومترها سیمکشی احتیاج بود.
به گزارش پایگاه خبری «عصر خودرو»، استفاده از تکنولوژی مالتی پلکس پاسخی مناسب به این معضل بود که موجب شد حجم اتصالات به میزان قابل توجهی کاهش یافته و در مقابل به هوشمندی و انعطاف سیستم بسیار افزوده شود. درباره تکنولوژی مالتیپلکس در خودروها پیش از این بسیار سخن گفتهایم اما در این نوشتار سعی داریم نگاهی دقیقتر به دو پروتکل محبوب شبکههای مالتی پلکس خودرویی داشته باشیم؛ شبکههای CAN و VAN.
گفتار به روش ECUها
پیش از آنکه بخواهیم بحث را آغاز کنیم، بد نیست که مروری به مفهوم مالتی پلکسینگ و هدف استفاده از آن در خودرو داشته باشیم.
به صورت کلی، هدف از مالتیپلکسکردن یک ارتباط، استفاده از خطوط مشترک جهت ارسال سیگنالهاست. به عبارت سادهتر، با کدکردن سیگنالها میتوان از تعداد محدودی خط ارتباطی برای ارسال حجم قابل توجهی از اطلاعات استفاده کرد. نتیجه این است که دیگر نیازی به دهها و یا صدها رشته سیم یا خط ارتباطی مجزا برای ارسال سیگنالهای مختلف وجود ندارد. تکنولوژی مالتی پلکس کاربرد وسیعی در تمامی وسایل الکترونیکی از ساعت دیجیتال گرفته تا معماری کامپیوترها و تلفنها تا خطوط مخابرات و شبکه جهانی اینترنت دارد. در خودروها هدف از استفاده تکنیک مالتی پلکس، سادهسازی ارتباطات مابین ECUهای متعدد موجود در یک اتومبیل است.
آداب گفتار در دنیای شبکه و سیم
برای برقراری ارتباط میان ECUهای یک خودرو، از شبکه BUS استفاده میشود. شبکههای CAN و VAN نیز نوعی شبکه BUS هستند. هر خودرو میتواند چندین شبکه BUS مختلف داشته باشد که توسط مادول کنترل بدنه یا BCM مدیریت میشوند. هر شبکه BUS متشکل از دو رشته سیم به هم پیچیده است که ECUها با آرایشهای متفاوتی نظیر آرایش ستارهای، حلقهای، درختی و ... به آن متصل میشوند. هر ECU متصل به شبکه BUS نیز برای برقراری ارتباط دارای یک ترانسیور شبکه و کنترلکننده پروتکل (مدار مالتیپلکسر) است که ترانسیور ارتباط فیزیکی با خطوط BUS را فراهم کرده و کنترلکننده پروتکل، پیغامهای مورد نظر را بر مبنای اساس پروتکل آن شبکه کدبندی کرده و به شکل سیگنالهای آنالوگ تحویل ترانسیور میدهد.
هر شبکه برای آنکه بتواند بستری برای تبادل دیتا باشد، دارای پروتکلی معین است. پروتکل هر شبکه بر اساس 7 لایه استاندارد OSI
(Open System Interconnection) تعریف شده که در آن موارد زیادی از جمله چگونگی فریمبندی و کدبندی سیگنال پیغام، مسیرهای عبور پیغام، اولویتهای عبور، تداخل سیگنال، کدهای شناسایی، روش کشف خطا، کنترل نویز و ... بر اساس کدهای باینری و هگزادسیمال تعریف میشود.
تمامی موارد ذکر شده در پروتکل شبکه لحاظ شده تا بدین ترتیب در شرایط متنوع موجود سیستم قادر باشد بدون مشکل به کار خود ادامه دهد. در ادامه به بررسی دو پروتکل محبوب CAN و VAN و شباهتها و تفاوتهای این دو میپردازیم.
شبکههای CAN و VAN
در میان انواع شبکههای مالتیپلکس خودرویی، دو نوع CAN و VAN نسبت به سایر پروتکلها محبوبترند. شبکه CAN (مخفف Controller Area Network) یکی از موفقترین استانداردهای BUS خودرویی است که برای نخستینبار توسط بوش آلمان توسعه یافت و عمدتا در ارتباطات مابین ECUهای محفظه پیشرانه مورد استفاده قرار میگیرد.
شبکه VANا (Vehicle Area Network)نیز که توسط PSA و رنو به صورت مشترک توسعه یافته، دارای انواع مختلفی است که عمدتا در ارتباطات محفظه کابین کاربرد وسیع دارد.
همانطور که گفتیم پروتکلها بر اساس 7 لایه ارتباطی OSI شامل لایه فیزیکال، لایه لینک، لایه نتورک، لایه ترنسپورت، لایه هماهنگی، لایه آمادهسازی و لایه اپلیکیشن شکل میگیرد.
شبکه CAN تنها بر اساس دو لایه اول OSI یعنی فیزیکال و لینک شکل گرفته است. اساس کار این شبکه، ارسال دیتا به شیوه انتشاری (Broadcast) بدون هیچگونه آدرسدهی مشخص است.
هر ECU در شبکه دارای یک سری پایه ورودی یا Input و خروجی یا output است که از طریق آن به خطوط BUS متصل شده است. هنگامی که یک گره یا ECU میخواهد پیغامی را در شبکه ارسال کند، محتوای مورد نظر خود را (که میتواند شامل اطلاعات یک سنسور یا فعال شدن یک کلید باشد) تحویل کنترلکننده شبکه خود میدهد. کنترلکننده شبکه یا مدار مالتیپلکسر شامل یک مدار تولیدکننده فرکانس، یک مجموعه کنترلکننده پروتکل و یک مدار ترانسیور (فرستنده و گیرنده) است. پیغام مورد نظر ECU که قرار است در شبکه ارسال شود، توسط پردازنده خود ECU تولید شده و به کنترلکننده پروتکل (در اینجا کنترلکننده CAN) میرسد. کنترلکننده پیغام دریافتی را روی یک فریم اطلاعاتی منطبق بر استاندارد CAN قرار داده و با توجه به مفهوم و درجه اهمیت پیغام، آن را شناسهگذاری (برچسبگذاری) میکند و تحویل تراشه ترانسیور میدهد. نهایتا پیغام تولید شده بسته به سطح نویز و ورژن CAN مورد استفاده به شیوه موازی یا دیفرانسیلی (تفاضلی) در خطوط ارسال میشود. همانطور که در ابتدا گفتیم در شبکه CAN آدرسدهی خاصی وجود ندارد بنابراین هنگامی که پیغامی توسط ترانسیور یک ECU ارسال میشود، تمامی ECUهای متصل به شبکه به طور همزمان پیغام را مشاهده میکنند، یعنی پیغام انتشاریافته یا Broadcast شده است. اما از آنجایی که محتوای پیغام برچسبگذاری شده، تنها ECUهایی اقدام به دریافت و خوانش پیغام میکنند که متوجه شوند اطلاعات پیغام مورد نظر به آنها مربوط است. سایر ECUها که نیازی به پیغام صادر شده ندارند، صرفا ناظر شبکه هستند تا زمانی که پیغام مربوط به آنها صادر شود و یا خودشان بخواهند پیغامی را صادر کنند. هنگامیکه ECU ناظر است و نیازی به تحلیل و پردازش اطلاعات دریافتی ندارد، صرفا به صورت Input/output عمل کرده و محتوای دریافتی را نادیده گرفته و مجددا تحویل شبکه میدهد. مسئله شناسهگذاری پیغام در روش انتشاری اهمیت بسیار بالایی دارد چراکه بدین صورت هنگامی که ECU سیستم سوخترسانی اطلاعات سرعت خودرو را در شبکه ارسال میکند، به عنوان مثال ECU سیستم تهویه متوجه میشود که نیازی به این اطلاعات ندارد و تنها اطلاعات مورد نظر برای یونیتی نظیر یونیت صفحه کیلومترشمار لازم است.
یکی از مشکلاتی که در شبکههای انتشاری وجود دارد، مسئله داوری حق تقدم ارسال پیغام است. در یک شبکه انتشاری نظیر شبکه CAN، تمامی ECUها مستر هستند؛ یعنی قادر به تولید فریم اطلاعاتی و ارسال و دریافت پیغام هستند. هنگامی که یک ECU میخواهد پیغامی را در شبکه ارسال کند، مشکل خاصی وجود ندارد اما مشکل داوری و حق تقدم هنگامی ایجاد میشود که چند ECU به طور همزمان قصد اشغال BUS و مخابره پیغام را داشته باشند. برای حل این مشکل، از فرایند دستیابی چندگانه به مسیر استفاده میشود. هر ECU که بخواهد پیغامی را مخابره کند، ابتدا صبر میکند که شبکه ساکت شود و بعد از آنکه کنترلکننده شبکه آن ECU اختیار BUS را به دست گرفته و با ارسال یک بیت به مفهوم آغاز پیغام، شروع به سنکرون کردن (هماهنگکردن) اطلاعات جهت شروع ارسال کرده و سایر ECUها ساکت میشوند. هنگامی که چند ECU به طور همزمان بخواهند شبکه را به دست بگیرند و بیت سنکرون برای آغاز پیغام ارسال کنند، خطای برخورد رخ میدهد. در این حالت فرآیند داوری جهت دستیابی چندگانه به شبکه انجام میشود و اجازه ارسال پیغام در ابتدا به ECUهایی داده میشود که شناسه پیغام آنها اولویت بالاتری داشته باشد.
شبکه VAN از نظر تکنیکی نسبت به CAN بسیار پیچیدهتر عمل میکند. برخلاف CAN، شبکه VAN بر اساس هر 7 لایه OSI شکل گرفته و از اصول Broadcast پیروی نمیکند بلکه شبکهای تکمستر یا مالتیمستر است. در این نوع شبکه تنها ECUهایی قادر هستند فریم اطلاعاتی تولید کنند که مستر باشند و باقی ECUها یا صرفا شنونده هستند یا به روش دستکاری بیتهای اطلاعاتی پاسخ میدهند. در این شبکه، ارسال سیگنال صرفا به صورت دیفرانسیلی صورت میگیرد تا اعوجاج سیگنال تا حد امکان ناچیز باشد. شبکه VAN نیازی به برچسبگذاری اطلاعات ندارد چراکه برخلاف CAN که تمامی ECUها به صورت همزمان فریم را مشاهده میکنند، در VAN پیغام فقط برای فرستنده و گیرنده قابل مشاهده بوده و آدرسدهی شده است بنابراین واحد کنترلی که در این آدرس وجود ندارد، در خوانش بیت دخالت نکرده و به صورت Input/Output عمل میکند. این خاصیت VAN موجب میشود که مسئله داوری و حقتقدم چندان در آن مطرح نباشد چرا که هر فریم آدرسدهی شده صرفا توسط ECU حاکم (مستر) به ECU مستخدم ارسال شده و بازخورد آن به شیوه دستکاری بیت دریافت میشود.
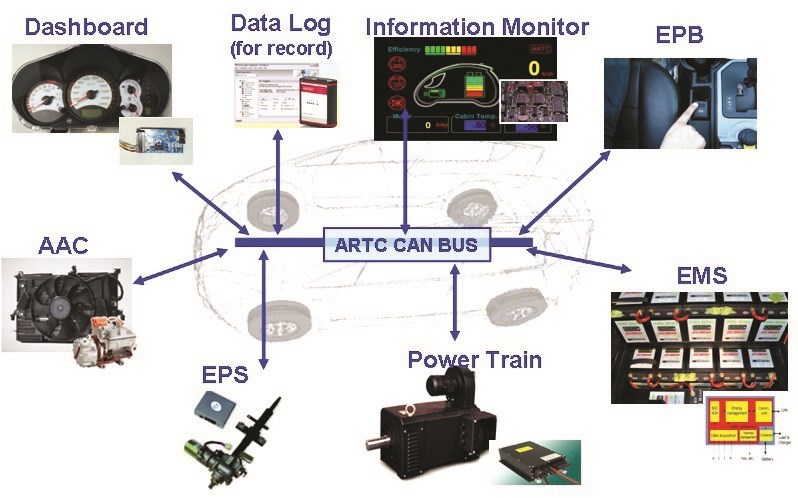
در شبکه مالتی پلکس خودرو از نظر سیستمی ناحیه بندی میشود
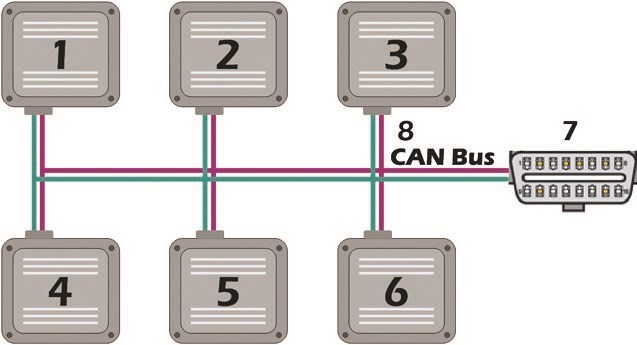
خطوط شبکه در ارتباطات عیب یابی نیز دخالت دارند

وجود تکنولوژی مالتی پلکس این امکان را به ما داده تا خودروهایی مجهزتر از گذشته داشته باشیم
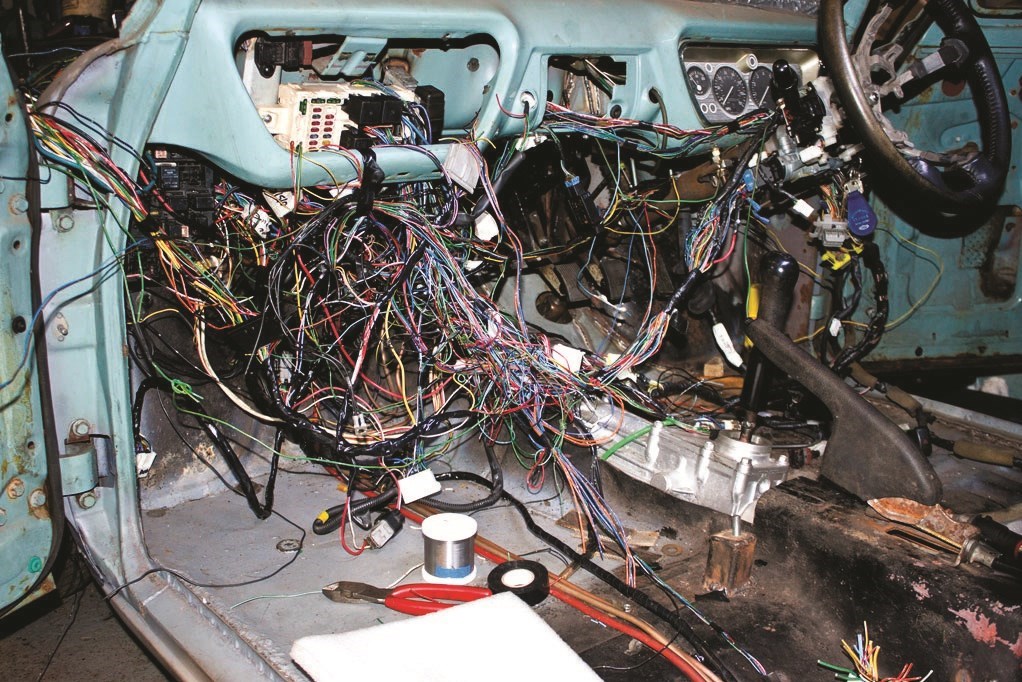
در نبود تکنولوژی مالتی پلکس چنین حجم سیم کشیای را شاهد خواهیم بود

با کمک پروتکلهای مشترک تنها با یک دستگاه خودروهای زیادی را میتوان عیب یابی کرد
نویسنده عارف منظری
- صنعت خودرو سازی
- تکنولوژی
- سیستم صوتی خودرو
رونمایی اولین خودرو تولید انبوه با تکنولوژی ترمز الکترومکانیکی
افزایش قیمت خودروهای برقی صادراتی چین از سال 2026 قطعی شد
سهم 57 درصدی ایرانخودرو از کل تولید خودرو سواری کشور
صنعت خودرو سازی در ایران و جهان؛ وزارت صمت کجای ماجراست؟
راستیآزمایی ادعای کاهش تولید ایران خودرو
رئیس رنو استعفا میدهد
رشد 126 درصدی درآمد «سایپا»
آینده نامشخص نیسان، اخراج پرسنل و تعطیلی کارخانه ها
رکود خودرو یکساله شد
تعلل در اعلام قیمتها به ضرر مردم و تولید کننده
خودرو در مسیر گرانی
صنعت خودرو منتظر شریک خارجی
بخش خصوصی بار خودروسازی را از دوش دولت برمیدارد
حدود 50 هزار خودرو وارد کشور شده است/ واردات خودرو میتواند به افزایش کیفیت کمک کند
آخرین ترکیب سهامداران برای حضور در مجمع سرنوشت ساز
خودروهایی که مردم از ما توقع دارند، هنوز تولید نمیشود
-
تولد یک رویا
صنعت خودرو نیاز به مدیران مستقل دارد
ردپای قیمت فلزات گرانبها در صنعت خودرو
5 مشکل صنعت خودرو ایران؛ از مجمع الجزایری بودن تا تغییر زود به زود مدیران
خودروهای برقی برنده میشوند؟
قیمت گذاری دستوری مشکل صنعت خودرو
مردم در آینده خبرهای خوبی از صنعت خودرو خواهند شنید
هزار دانشجو بورسیه خودروسازی میشوند
تمام آن چیزی که باید در مورد شناخت خودروها بدانید (+عکس و جزئیات کامل)
حل مسائل صنعت خودرو با ایجاد پردیس علموفناوری خودرو
روز سیاه تاریخ خودروسازی ایران
قیمت کارخانهای باید اصلاح شود
کبری؛ این مار خوش خط و خال 350 هزار دلاری! +عکس
عرضه محصولات خودروسازان خصوصی با قیمت بهمن 1401 به مدت یک سال
فونیکس در آستانه تحولی بزرگ در صنعت خودرو
صنعت خودرو سیب زمینی بکارد یا پیاز؟
تور جی پی اس خودرو برای سارقان ماشین در تهران
تسویه مطالبات قطعهسازان تا پایان سال
هایما 8S دو ماه زودتر از موعد وارد بازار شد
در 2 سال آینده تولید خودروهای جدید را خواهیم داشت
معاونت حراست گروه خودروسازی سایپا عنوان برتر را کسب کرد
دستورالعمل شورای رقابت مغایر سیاست رییسجمهور است
وبینار رایگان متدولوژی AUTOSAR، مسیر تحول نرمافزار در صنعت خودرو
پاسخ های خطیبی به تمام حاشیه سازان برای ایران خودرو
چرا بورس کالا با پیش فروش خودرو خارجی مخالف است؟
سریال رکوردزنی ایرانخودروییها به محورسازان رسید
افیلا؛ نخستین خودرو سونی به عنوان یک فضای سرگرمی متحرک عمل می کند+ عکس
جزئیات 3 مرحله نقشه راه تحول صنعت خودروی کشور تا پایان 1404
گام نخست برنامه تحولی صنعت خودرو محقق شد
نقطه روشن در بازار خاکستری خودرو
جهش خودروسازان در آبان ماه 1401
برنامه تحولی بازار خودرو وزارت صنعت ، معدن و تجارت
اگر نرخ ارز بگذارد، قیمت خودرو پایین می آید
استپ کیفی خودروهای قدیمی
فرسودگی 17 میلیون وسیله نقلیه در کشور
انقلاب خودرویی در خاورمیانه
آغاز تولید انبوه تراشههای الکترونیکی صنعت خودرو
کاهش تولید خودرو در انگلیس
اولویت با واگذاری مدیریت و تصدیگری دولت در صنعت خودرو است
هماندیشی وزیر اقتصاد با دانشگاهیان و فعالان صنعت خودرو درباره واگذاری خودروسازها
ایران در ارمنستان خودرو میسازد
رشد 5.7 درصدی تولید خودرو سواری تا پایان مردادماه
ایجاد ارتباط میان دانشبنیانهای حوزه خودرو با صنعت از طریق راهاندازی مرکز تحقیقات مشترک
رشد صنعت با تیکآف خودرو
یک لایحه دوفوریتی درباره صنعت خودرو تقدیم مجلس شد
محسن رضایی: گلایه رهبر انقلاب باعث تحول در صنعت خودروسازی شد
عرضه خودروی اقتصادی به بازار از اواسط سال آینده
دومینوی زیان خودروسازی
افتتاح و بازدید وزیر صمت از نخستین نمایشگاه تحول صنعت خودرو
پیام مدیرعامل گروه صنعتی ایران خودرو به مناسبت هفته دولت
بدبینی خودروسازان در ابتدای تابستان
همکاری وزارت صمت و دفاع باعث جهش و موفقیت صنعت خودرو شده است
خودروهای جدید در انبارهای جهان ماندگار میشوند؟
پلتفرم مشترک خودرو بین ایران، روسیه و چین تعریف شود
بررسی آیین نامه قانون ساماندهی صنعت خودرو در کمیسیون صنایع
برنامههای وزارت صمت برای حل مشکلات صنعت خودروی کشور
روشهای کاهش قیمت خودرو در گزارش تحول صنعت خودرو
تحویل خودرو در زمستان پارسال 30 درصد رشد کرد
تغییر روندها در صنعت خودرو بهسوی شخصیسازی پیش میرود
ماجرای «ذخیرهها» چه بود؟
افتتاح مرکز نوآوری تخصصی صنعت خودروهای پیشرفته از تیرماه
مطالبات قطعه سازان چقدر است؟
گروه های فشار نمی گذراند تصمیمات درست برای صنعت خودرو اتخاذ شود
بازنده تصمیم جدید خودرویی کیست؟
نکاتی مهم در مورد قانون ساماندهی صنعت خودرو
اول باید مشخص کنیم در چه شرایطی میخواهیم کارکنیم سپس باید نرخ واقعی ارز را در نظر بگیریم
به جای تخریب، دست یاری بدهید تا مشکلات را رفع کنیم
تحقق منویات مقام معظم رهبری، نیازمند حمایت بانک ها است/ تزریق منابع اعتباری جدید به خودروسازان، یک الزام است
تولید 3616 دستگاه خودرو در گروه صنعتی ایران خودرو در یک روز/ 68درصد تولید محصولات سواری کامل و بدون کسری قطعه
مدیرعامل گروه صنعتی ایرانخودرو، بر بهبود وضعیت صنعت خودروی کشور تاکید کرد
روند افزایشی فروش جهانی خودروهای الکتریکی آغاز شد
خودروسازی ویترین توسعه صنعتی است، هیچ کشوری آن را بهدست بیگانگان نمیسپارد
درآمیختگی کسب و کار خودرو با حاکمیت باعث زیان هشتاد هزار میلیارد تومانی
تصویر بازار خودرو در 1400
تأثیر جنگ روسیه در اوکراین بر قیمت مواد خام و خودروهای برقی
مجلس طرفدار حضور بخش خصوصی در صنعت خودروی کشور است
8 فرمان رییسجمهوری به صنعت خودرو قابلیت اجرا دارد
تولید فورد F-150 برای دومین بار در یک ماه متوقف میشود
«نعمت زاده» انحصار در صنعت خودرو را زنده کرد
راههای باقی مانده برای نجات صنعت خودرو سازی ایران
به فریاد صنعت خودروسازی برسید
خودرو در دستانداز دهه 90
سال آینده قرعه کشی خودرو نخواهیم داشت
معاون رییس جمهور در امور زنان: حضور بانوان توانمند در قطعه سازی کروز ستودنی است
همایش تجلیل از بانوان صنعتگر خانواده کروز آغاز شد
صنعت خودروسازی دانشبنیان میشود
210 میلیارد دلار زیان خودروسازان جهان در سال 2021
عملکرد تولید و فروش خودروسازان بزرگ در آذر ماه
آیا خودروسازان از عرضه خودرو خودداری میکنند؟
بدون برجام با صنعت خودرو
برنامه تحول صنعت خودرو در 9 محور به زودی رونمایی میشود
4 برنامه وزارت صنعت برای ساماندهی صنعت خودرو
افزایش عرضه خودرو به دست خودروسازان محقق شد؟
داخلیسازی در صنعت خودرو؛ دستاوردها و چالشها
چگونه با سرمایه گذاری در صنعت خودرو سود کنیم؟
کمبود جهانی تراشه احتمالاً تا سال 2022 ادامه مییابد
لغو قیمتگذاری دستوری صنعت خودرو و ساخت قطعات
رییس شورای رقابت تغییر میکند؟
چشم انداز مطلوب "ولبهمن"
سکته خودروسازی در تابستان
واردات قطعات توسط خودروسازان به شرکت های داخلی ضربه زده است
فرزندان سنگر پدران را در کشور حفظ کنند
بررسی طرح ساماندهی صنعت خودرو در پژوهشکده شورای نگهبان
تولید قطعات فلزی و کامپوزیتی با چاشنی تکنولوژی
محکومیت قاچاقچی لوازم صوتی خودرو در آبادان به پرداخت جریمه
سقوط سنگین 33 درصدی نرخ فروش فوردموتور آمریکا
توجه به صنایع خودروسازی ضروریست
12 وسیله نقلیه که در تست تصادف IIHS امتیاز پایینی دریافت کردهاند
تولید خودروسازان به بیش از 289 هزار دستگاه رسید
تاثیر تحریم های داخلی بیشتر از تحریم های خارجی در صنعت خودرو بود
افزایش بی سابقه ی تقاضا برای مینی ون، خودروی خانواده
سیاست مجلس حمایت از صنعت خودرو است
تقویت توانمندی داخلی و رفع موانع تولید، مسیر توسعه صنعت کشور است
سفر به آینده با خودرو
تمرکز ایران خودرو داخلی سازی قطعات برای مقابله با تحریمها است
آیا نظامیها به خودروسازی ایران ورود میکنند؟
کابینی برای خدمه
تامین مالتیمدیای سایپاشاهین از منبع داخلی سوم آغاز شد
شاهین سایپا با نمایشگر سراتویی آماده تحویل است
مسیر خودروسازی جهان تا سال 2028
ورود خودروسازان خارجی به ایران چقدر جدی است؟
دلیل زیان خودروسازان
توجه ویژه کروز به بخش پژوهش قابل تقدیر است
هیچ اختلالی در تأمین ورق فولادی خودروسازان ایجاد نمیشود
رونمایی از مینی سقف تاشو چینی در نمایشگاه خودروی شانگهای 2021
صادرات خودرو با وجود کمبود در بازار؛ الزام استانداردهای 85 گانه برداشته شد!
چشمانداز آتی صنعت خودرو
جزئیات 9 استاندارد تعلیق شده صنعت خودرو
شرط کاهش قیمتها در بازار خودرو
کارنامه 99 صنعت خودرو
این بار جای پای چینیها در ایران محکمتر از اروپاییهاست
مذاکرات اینتل برای تولید تراشه برای خودروسازان
"هوآوی" رقیب "تسلا" در صنعت خودروهای هوشمند میشود!
چراغ راهنمای خودروسازی در سال 1400
10 اتومبیل تکرار نشدنی تاریخ رالی + تصاویر
تکلیف نوروزی خودروسازان
نمایش خودرو و تست درایو فردا SX5 در شمال کشور
تولید بیش از 829 هزار دستگاه خودرو سواری تا پایان بهمن ماه
حذف و اضافه خودروهای 99
بازنشستگی زودهنگام 4000 نفر در فولکس واگن
170هزار کامیون کشنده باید طی سه سال آینده در کشور بازسازی شود
گامهای اساسی برای افزایش طول عمر خودرو
سقوط محبوبیت 5 برند خودرویی در یک دهه
سقوط محبوبیت 5 برند خودرویی در یک دهه
فانتوم تمپوس؛ انتشار جدیدترین اطلاعات از کهکشان لوکس رولز-رویس +عکس
سایپا طی دو سال اخیر متحول شد
دنیای فناوری با کمبود تراشه مواجه شد
مزایدههای ایران خودرو، اینترنتی شد
معرفی 10 خودروی برتر لوکس
درخواست 27هزار میلیاردتومان منابع جدید با وعده رشد 50درصدی تولید خودرو
تجمع شاکیان آذویکو مقابل وزارت صمت
فرمول جهانی قیمت
تعدد در خودروسازی یک سم مهلک است
گزارش ارزشیابی کیفی خودرو دی99 منتشر شد
تغییر ذائقه ارزی خودروسازان
سایپا در مسیر توسعه سبد محصولات
خودروسازان چگونه جهش دلار را خنثی کردند؟
برترین تولیدکنندگان خودروهای الکتریکی در جهان
تراشه سازان آسیایی به جنگ کمبود عرضه جهانی میروند
شیشه خودرویی بزودی برای اولین بار در آذربایجان شرقی تولید میشود
مقابله با آلودگی هوا و عزم آسیایی ها برای استفاده از خودروهای برقی
لانچیا ایپسیلون فیس لیفت 2021؛ هاچ بک کوپه با پیشرانه هیبرید ملایم +عکس
زیان شرکتهای خودروساز 2.5 برابر میشود
افت تولید دی ماه علیرغم افزایش آمار تولید خودروسازان اصلی طی 10 ماهه امسال
صنعت خودرو، قربانی قیمتگذاری دستوری است
مدیریت دولت در خودروسازی با 20 درصد سهم در این صنعت
چرا صنعت خودرو خصوصی اداره نمیشود؟
ارتقای خودروسازان ایرانی در تحریم / اصلاح نظام قیمتگذاری، صنعت خودرو را شکوفا میکند
ارزشمندترین خودروسازان جهان تا پایان 2020
کنسرسیوم تولید خودرو با برند آذربایجان ایجاد میشود
ساخت موتور سهسیلندر ملی با 95 درصد داخلیسازی
-
کرمانشاه ظرفیت تبدیل به قطب تولید قطعات خودرو را دارد
تولید بیش از 730 هزار دستگاه خودرو توسط خودروسازان بزرگ داخلی
ایرانخودرو از رکورد تولید دو سال گذشته عبور کرد
ضرورت تکمیل حلقه های تولید خودرو در آذربایجان شرقی
آلمان در بحران کمبود تراشه دست به دامن تایوان شد
تسریع در عرضه با لغو مصوبات خودرویی؟
باکیفیتترین سواریهای داخلی کدامند؟
تحویل خودروسازان کاهش یافت
عربستان سعودی از سال 2022 خودروساز می شود
چه خودروهایی قرار است 2021 عرضه شوند؟
عراق به دنبال سرمایهگذاری ایران در بخش خودرو است
انحصار در تولید خودرو یا مدیریت آن
کاهش شدید فروش خودروسازان بزرگ دنیا
3 حوزه صنعت خودرو که بیشترین رسوخ فناوری نانو را تجربه کردند
چانگان ایی-پرو 2020؛ کراس اوور جمع و جور 16 هزار دلاری چینی +عکس
وارثان ناموفق تاج و تخت
«استلانتیس» چهارمین گروه بزرگ خودروسازی جهان
طرح ویژه دولت برای افزایش تولید خودرو
10 خودروی لوکس پلیس در دنیا
قطعهسازان، خودروساز میشوند؟
تغییر مسیر در خودروساز هندی
آمادگی وزارت صمت برای راه اندازی خودروسازی با مشارکت ایدرو و بخش خصوصی توانمند در آذربایجان شرقی
این خودروها به آخر خط رسیدند!
رشد تولید خودروسازان بزرگ به همراه ورود محصولات جدید
تولید خودروی برقی با شتاب صفر تا صد 1.72 ثانیه
زیان 4500 میلیارد تومانی دو خودروساز بزرگ در شش ماه
آثار طولانیمدت کرونا بر صنعت خودرو
رالی زیاندهی در زنجیره خودروسازی
خطر بزرگ بیخ گوش صنعت خودرو
صنعت خودروسازی تابع تصمیمات سیاسی است
لوکسژن URX ؛ کراس اوور تایوانی جدید با ردپایی از یک کمپانی مطرح چینی! +عکس
ایزدرا کومندتوره 112 آی؛ یکی از کمیاب ترین خودروهای جهان با قلب مرسدس بنز! +عکس
خودروی جدید فیات و ابارث
فریاد از همهگیری خودروهای برقی
ایلیشن دوگو؛ ابرخودروی جدید با الهام از یک سگ قدرتمند! +عکس
شناسایی 30 شرکت قطعه ساز خودرو در استان فارس
صنعت خودروسازی مسیر بهبود کیفی را آغاز کرده است
خودروسازی در دوراهی کپی یا مونتاژکاری
قطب نمای خودروسازی در پساتحریم
سنگ بزرگ رشد 50 درصدی تولید خودرو
بنبست وعدههای خودرویی
رویایی ترین خودروی دهه 90 میلادی با قلب 12 سیلندر+عکس
رقابت دقیقه ای تولید خودرو بین بزرگترین شرکت ها
رقابتی کردن صنعت خودرو جزو برنامههای وزارت صمت است
طرحهای خودرویی «صمت» ختم به خیر میشود؟
کیفیت خودروهای سنگین از سواریها جلو زد
ناران اتوموتیو و رونمایی از اسپرت 1062 اسب بخاری +عکس
تاثیر مجلس و قوانین روی صنعت خودرو
آشنایی با سریعترین خودروهای هیبریدی جهان
احیای تولید خودرو در جمهوری چک
صنعت خودروسازی باید از رانت دولتی خارج شود
آینده مبهم صنعت خودروسازی جهان در سایه کرونا
معرفی 10 خودروی محبوب از لحاظ قیمت، پیمایش و ایمنی
عدم سرمایه گذاری در صنعت خودرو، سبب تعمیق شکاف فناوری در آینده این صنعت خواهد شد
برترین برندهای خودرویی جهان معرفی شدند
مزدا قابل اطمینان ترین برند خودروسازی 2020
تسریع در تحقیق و تفحص از خودروسازی
ممنوعیت فروش خودروی بنزینی از 2030
هوای پاک؛ هدف خودرویی بایدن
طرح «مشوق جهش تولید خودرو» و ساماندهی بازار
بومیسازی بخشهایی از موتور ملی و پمپ هیدرولیک فرمان خودروها از سوی محققان کشور
دایملر کوچک میشود
ایران با وجود کرونا و تحریم پانزدهمین خودروساز جهان شد + جدول
کاهش فروش خودرو در هفت ماه امسال
مقایسه تولید خودروی ایران با جهان
پیشتازان کامپوزیت
وزیر صنعت بهدنبال تقویت بخش خصوصی خودرو
پیشبینی خیز خودروسازی ایران
تخصیص هزینه سفر به خودروهای لوکس
معجزه خودرویی با اصلاحات آلمانی
معنای لوگوی خودروسازها چیست؟
سبقت خودروسازان ایران و جهان از کرونا
موفق ترین خودروهای الکتریکی در بازار جهانی +عکس
نقشه راه توسعه مراکز تست و آزمون در صنعت خودرو تدوین شد
پاندمی کرونا و صنعت خودروی جهان
غولهای خودروسازی جهان از دولت آمریکا شکایت کردند
کروز طراحی، تولید و کالیبراسیون ای سی یو را در ایران انجام می دهد
متهم اصلی سرکوب مالی خودروسازان
تسهیل فرآیند تولید خودروی دستساز، مسیری برای رشد صنعت خودروسازی
رشد فروش خودرو سوار بر موج زیان
از کاهش فروش تا گرایش مردم به سمت خودروهای کارکرده
ایران به صف خودروسازان جهانی می پیوندد
سند موازی «صمت» برای «خودرو»
اهداف کیفی خودروهای سواری در 99
بهترین خودروهای شاسی بلند 2020
فیس لیفت خودور یا بروزرسانی چیست؟
آینده خودروها را نیمه هادی ها و نرم افزارها می سازند
آینده مبهم صنعت خودروسازی جهان در سایه کرونا
ارزش بازار برترین خودروسازان جهان
شکوفایی صنعت خودروسازی ایران بهرغم رکود جهانی ناشی از کرونا
خودروی ایمن،با کیفیت و مردمی باید جایگزین پراید شود
سیتروئن TUB و اولین درب کشویی در صنعت خودروی جهان! +تصاویر
تولید خودروی ارزان، از حرف تا عمل
افزایش داخلی سازی در صنعت خودرو با حمایت از نسل جوان و متخصص کشور
کدام کشورها آماده خودروهای بدون راننده هستند؟
بهترین خودروهای شهری معرفی شدند
جزئیات پیشنهاد تدوین بسته مشوق ساخت داخل صنعت خودرو منتشر شد
در زمینه خودروسازی کمککننده هستیم، نه تولیدکننده
ضرورت افزایش بودجه پژوهش در صنعت خودرو
بازار سهام قیمت خودرو را پایین کشید
از صعود غیر سواریها تا کمیته ارزی قطعهسازان
ضرورت اعتماد متقابل صنعت خودروسازی و مجموعه های دانش بنیان
قیمت خودرو در بازار بهزودی متعادل میشود
تسلا از تویوتا سبقت گرفت و گرانترین خودروساز جهان شد
قدرتمندترین ماشین ایتالیایی چه ویژگی هایی دارد؟
مسایل جاری نباید باعث غفلت از سند چشمانداز صنعت خودرو شود
بهترین خودروهای آفرود سال 2020 را بشناسید
بزرگترین تولیدکنندگان خودرو کدامند؟
رشد ارزش تسلا
بازار فروش خودروهای برقی چه زمانی شکوفا میشود؟
مواد اولیه تولید خودرو چقدر گران شده است؟
سه گام برای اصلاح خودروسازی
اوضاع بزرگترین بازارهای فروش خودرو چطور است؟
رشد چشمگیر سهم خودروهای برقی از بازارهای جهانی
کارنامه خودرویی رئیس سابق «صمت»
درانتقال فناوری به صنعت خودرو محدودیتی نداریم
ادغام مجدد رنو و نیسان برای فرار از بحران کرونا
سناریوهای پیش روی صنعت خودرو تا سال 1404
نمایشگاه بینالمللی خودروی نیویورک کنسل شد
بازسازی درازترین خودروی جهان + تصاویر
بهترین شاسیبلندهای 2020 را بشناسید + تصاویر
معرفی خودروهای الکتریکی با بیشترین توان پیمایش
پیکان چگونه متولد شد؟
بازار خودروهای برقی داغ میشود
مرسدس بنز آ ام گ C63 S مدل 2020 معرفی شد+ تصاویر
10 سدان لوکس راحت با قیمتی در حدود 10 هزار دلار
قیمت خودرو کاهش یافت
خداحافظی با خودروهای تحویل فوری
داج چارجر هلکت واید بادی 2020+ تصاویر
لندروور 50 ساله شد
تأثیر ویروس کرونا بر شرکتهای کرایه خودرو به خودروسازان هم آسیب رسانده است
راهکارهایی برای نجات صنعت خودرو از چاله اقتصاد
خودروسازان داخلی از چه نوع ورقهای فولادی استفاده میکنند؟
فرماندار میشیگان مجوز آغاز فعالیت کارخانههای خودروسازی را صادر کرد
قابلیت شخصیسازی از راه دور اتومبیل Evija برای خریداران
نگاهی به مزایا و معایب خودروهای الکتریکی
رشد درآمد خودروسازان در ایام کرونا
تحقق جهش تولید در گروه سایپا با تولید محصولات جدید
عبور از رقم خیره کننده 15 میلیون
صنعت خودرو در صدر دریافت وام کرونایی
زیان 5 میلیارد دلاری صنعت خودرو ترکیه از کرونا
تعطیلی خودروسازان آمریکایی تا کی ادامه دارد؟
ویروس کرونا چه بلایی بر سر «خودروسازان» آورده است؟
آغاز مجدد فعالیت شرکتهای خودروسازی در اروپا
فراری دو محصول جدید عرضه میکند
بورس و خودرو، مقصد سرمایهگذاران در 99
بازگشت خودروهای ناقص
59 خودرو که در سال 2020 تولید نخواهند شد
جدال نفسگیر جگوار اف تایپ و پورشه 911 +فیلم
نخستین شماره «خودرو امروز» در سال 99 منتشر شد
کاهش شدید فروش خودرو در جهان
ویروس کرونا با صنعت خودرو چه کرد؟
ضرورت تسریع در تامین نقدینگی به بخش صنعت
رکود 20 درصدی صنعت خودروسازی در جهان
افت محبوبیت گیربکسهای دستی
خودروسازان در دام کرونا
خودروسازان اروپا به تدریج تولید خود را از سر می گیرند
خودروسازی سرمایه ملی است
عرضه 4 محصول نانو برای صنعت خودروسازی
10 شاسی بلند خبرساز؛ از استون مارتین تا لوتوس +تصاویر
10 خودرو پرفروش دنیا در سال 2019 معرفی شدند
ساخت دستگاه لایه بردار با کاربرد در صنایع فضایی و خودرو
بهترین خودرو 2020 انتخاب شد
آغاز فعالیت زنجیره خودروسازی
جهش تولید صنعت خودرو با افزایش کیفیت محصولات
ارزانترین خودروهای سال 2020 را بشناسید
تاثیر ویروس کرونا بر صنعت خودروسازی
خودروسازان کارخانههای خود را باز میکنند
پولستار پریسپت؛ خودروی لوکس بازیافتی +تصاویر
خودروسازان پا پس کشیدند!
برنامه کاری صنعت خودرو در دوران کرونا
رشد 6 درصدی تولید خودرو
اقدام برندهای خودرویی مشهور جهانی برای رعایت فاصله اجتماعی + تصاویر
با ونها و استیشنها بیشتر آشنا شوید
تولید تجهیزات پزشکی به جای خودرو
قلدرترین شاسیبلندهای 2020 را بشناسید
تعطیلات دوهفتهای تابستانی به فروردین ماه منتقل شود
-
منتظر ارزان شدن خودرو نباشید
خودروهای پرندهای که در سال گذشته رونمایی شدند +عکس
راهکار جهش تولید در صنعت قطعهسازی
خودروسازان در صف تولید ماسک !
راهبردهای کلان ایران خودرو برای تحقق جهش تولید ترسیم شد
کاهش 151 میلیون یورویی ارزبری با داخلی سازی 103 قطعه در سال 99
صنعت خودرو در سالی که گذشت
کارخانه فولکس واگن در مکزیک تعطیل شد
کرونا تولید خودرو در آمریکا و اروپا را 1.4 میلیون دستگاه کاهش داد
بحران بیسابقه در صنعت خودروسازی؛ تقاضا به کف رسید
بررسی فولکس آپ GTI مدل 2020
سهم ناچیز تحقیق و توسعه در خودروسازی دولت ایران
بررسی نسل جدید لینکلن نویگیتور مدل 2020 + تصاویر
از درگذشت پدر خودروسازی تا افزایش تولید
هشدار به توقف دست کم 2 ماهه قطعهسازی و بیکاری 550 هزار نفر
جابهجایی خانوادگی سهام برای خروج از ورشکستگی
سرایت کرونا به خودروسازی ایران؟
صنعت خودروسازی کدام کشورها به چین وابسته است؟
5 محصول ایران خودرو ارتقای کیفی یافتند
کروز نخستین قطعه ساز در همکاری با دانشگاه های کشور برای طراحی قطعات پیشرفته داخلی است
رونمایی از 4 خودروی جدید با حضور رئیس جمهور
فروش تویوتا 41 درصد کم شد!
موتور یورو 5 هست اما بنزینش نیست!
آخرین مدل پانامرا معرفی شد
کرونا صنعت خودرو جهان را تهدید میکند
ارزبری صنعت خودروی کشور 25 درصد کاهش می یابد
پرداخت وام خودروسازان در نیمه دوم بهمن
معمای بازگشت خودروها به خط تولید
شعار درمانی در صنعت خودرو
طرح کاهش قیمت مواد اولیه صنعت خودرو هفته آینده نهایی میشود
هدف ما خودکفایی کشور در تولید انواع روانکارها است
10 شاسی بلند لاکچری سال 2019 را بشناسید
خودروهای پاک معاف شدند
کوچکترین خودروی پرنده جهان به بازار می آید
پرفروشترین خودروهای برقی در سال 2019
مروری بر فروش خودرو در کشورهای اروپایی
عمل به تعهدات اولویت خودروسازان در پیش فروش خودرو باشد
دیفرانسیل خودرو چیست و چه کاربردی دارد؟
قیمت خودرو کاهش مییابد
صنعت خودرو گوی سبقت را از نفت در کاهش آلایندگی ربود
بوروکراسی اداری، مدیران ناکارآمد و حضور دولت سه ضلع ناکامی در خودروسازی
خودروی یورو 5 نیازمند سوخت یورو 5 است
عرضه 500 هزار خودروی الکتریکی در کمتر از دو سال!
مذاکره با ژاپن چه تاثیری روی خودروسازی دارد؟
حل مشکلات صنعت خودرو سازی در پردیس نوآوری شهید طهرانی مقدم
خودروهای تولیدی از استانداردهای آلایندگی عقب نیستند
امکان اجرای «یورو5» در خودروسازی
جریمه کارخانجات به سود تولید کشور نیست
به دست آوردن جوایز ایمنی سخت تر شد
ادامه رکود خودروسازی جهان در 2020
خاصترین رنگهای خودرو در جهان
نظر خودروسازان درباره خودروی آبسوز!
خودروهای برقی و تعدیل هزاران کارگر
احتمال همکاری خودرویی با شرکای تجاری ایران
نقش خودروسازان در تبدیل کارگاهی خودرو
سیاستهای دولتی زیان انباشته خودروسازان را افزایش داد
فیسلیفت بینراهی S-MAX
از خودروهایی که دپویی ماندند تا سقوط تولید خصوصیها
بررسی خودرو بامو M 850 i دالر + مشخصات
بررسی مشکلات صنعت خودروسازی در کمیسیون صنایع و معادن مجلس
بازار خودرو در دست انداز قیمت
قراردادهای تحویل خودرو به «وقت گل نی» را بخوانید!
گام های ایران خودرو برای بومی سازی قطعات پیشرفته خودرو ستودنی است
دلایل زیان خودروسازان بررسی شد
تزریق آدرنالین در رگهای 500X
سهم هزینه نیروی انسانی در قیمت خودرو چقدر است؟
چرا صنعت خودرو به سمت کمجانی حرکت کرد؟
چهارمین خودروساز بزرگ جهان متولد میشود
انتظارات صنعت خودرو از سیستم بانکی چیست؟
آپشن «کروز کنترل» چیست؟
تاریخ پر پیچ و خم صنعت خودروسازی ایران
خودروسازی در لاین کندرو
صنعت خودرو 10 هزار میلیارد تومان بهره به بانکها پرداخت کرد
گرانی «پالادیم» کار خودروسازان را سخت کرد
فساد چوبی لای چرخ تولید است
تحویل تمام خودروهای ثبتنامی و تکمیلوجه شده سال97 به مشتریان
جنرال موتورز چه خوابی برای خودروهای برقی دیده است؟
صنعت خودروسازی نیاز به اصلاحات دارد
پژو و فیات کرایسلر تایید کردند که با هم ادغام خواهند شد
شناسایی گلوگاههای فساد
توسعه صنعت قطعه سازی اشتغالزایی و خودکفایی اقتصادی را در کشور به همراه دارد
گفت و گوهای ادغام فیات-کرایسلر با پژو-سیتروئن
رشد صنعت خودرو در خصوصی سازی این صنعت شکل می گیرد
بررسی فنی استون مارتین ونتیج AMR + مشخصات
حذف آپشن چقدر روی قیمت خودروها تاثیر دارد؟
خصوصیسازی راهکار جبران زیان خودروسازیها
"سوبارو" سوار بر بازار خودروهای استیشن آمریکا
زیان انباشته خودروسازان در مرز هشدار
چرا صنعت خودرو در ایران زیان ده است؟
زیان خودروسازان به 35/000/000/000/000 تومان رسید
زنگ خطر بحران تأمین مالی خودروسازان
بررسی فنی فیات تلنتو 2020 + مشخصات
فناوری خودروهای خودران
اروپاییها هنوز هم عاشق خودروهای استیشناند!
افت و خیز پاییزی بازار خودرو
شرکتهای خودروساز را به بخش خصوصی واگذار میکنیم
فرانسهزدایی از خودروسازی ایران
فرمان صنعت خودرو به شرق چرخید
الزامات پیش از واگذاری خودروسازیها
صنعت و شرکتهای دانشبنیان حوزه خودرو را به هم می رسانیم
همکاری سه جانبه خودرویی ایران، ترکیه و روسیه؛ از حرف تا عمل
تولید کدام خودروها افت بیشتری داشته است؟
آیا تولید خودروی مشترک به سرانجام میرسد؟
محبوبترین خودرو در هر کشور اروپایی کدام است؟
کاهش 27 درصدی قطعه سازی نسبت به سال گذشته
جای خالی ارتباط صنعت و دانشگاه در برنامه های وزیر صمت
ایران، ترکیه و روسیه مثلث خودروسازی تشکیل میدهند؟
همراهی مدیران ارشد آمیکو و مدیران استانی در اختتامیه نمایشگاه خودرو کرمانشاه
از بنبست دیزلیها تا ستارههای کیفی
10 تجربهی تلخ در تاریخ خودروسازی + تصاویر
بازنگری در دستورالعمل خدمات پس از فروش ایران خودرو
پلتفرمهای جدید نیاز صنعت خودرو
وزیر صمت عملکرد قابل قبولی دارد
ادامه یک راه ناتمام
شتابدهنده تخصصی خودرو راه اندازی می شود
خارج کردن پراید از چرخه تولید بدون تغییر و تحول در صنعت خودرو بیفایده است
تغییر سیاستی در صنعت خودرو
ضرورت استفاده از ظرفیت چینیها در بازار خودرو
خودروسازان انگلیسی خواهان تاخیر در برگزیت شدند
ضرورت شفافسازی در گروههای بزرگ خودروسازی
افزایش کیفیت و توسعه عمق ساخت داخل رویکردهای اصلی ایران خودرو
تحویل تمام خودروهای معوق سال 97 تا پایان ماه آینده
صدور فرمان عرضه خودروهای جدید
تحریم خودروهای ژاپنی در کره
اجرای نهضت ساخت داخل در صنعت با جدیت پیگیری شود
ترامپ برنامه داشت سه اتوبان منتهی به تهران را ببندد
افزایش کیفیت خودرو در گرو به روزرسانی چرخه تولید است
همه مردان ایران خودرو
هشدار وزیر بهداشت درباره مرگ و میر ناشی از تصادفات، خودروها و سوخت غیراستاندارد
برنامههای جدید «فِراری» برای افزایش فروش
محمدرضا گلزار با رضاروور، وارد صنعت خودرو شد
همگان باید برای بقای اشتغال صنعت خودرو به کمک بیاییم
خرید خودرو تبدیل به رویا شده است
دو سناریو برای شتاب در تکمیل خودروهای ناقص
طرحهای پژوهشی دانشگاه امیرکبیر خودرو در شرایط تحریم
رفتن شرکتهای خودروساز میتواند به نفع ما تمام شود
دومینوی توقف تولید خودروهای مونتاژی
سلطان باواریا از کجا آمده؟!
گزارش صنعت خودرو روی میز روحانی
اولویت دانشگاه امیرکبیر در راستای بومی سازی در حوزه خودروسازی
فولکس واگن رکورد زد
آذربایجان شرقی به عنوان قطب خودروسازی کشور مطرح می شود
فرصتسوزی خودروسازان در سرمایهگذاری
وقتی دخل و خرج خودروسازان با هم نمیخواند
به محض بهبود فضای کسب و کار بین المللی، داخلی سازی به فراموشی سپرده می شود
داخلیسازی در خودرو تا آخرین قطعه
چرا صنعت خودروسازی ما از دنیا عقب ماند؟
آماده حمایت از صنایع پر بازده هستیم
فولکس قورباغهای به آخر خط رسید +عکس
تولیدی که افت دارد
پرفروشترین خودروهای برقی چینی کدامند؟
نرخ سیستم صوتی و تصویری خودرو در بازار؟ +جدول
خصوصیسازی تنها راه نجات صنعت خودروسازی
«چاه ویل» خودروسازی
شمارش معکوس برای واگذاری باقیمانده سهام خودروسازان
ضرورت پرداخت 15هزار میلیارد تومان وام به دو شرکت خودروسازی
قیمتگذاری و ایجاد فضای کسبوکار از اصلیترین چالشهای صنعت خودرو
نرخ سیستم صوتی و تصویری خودرو در بازار؟ +جدول
آمار خودروهای ناقص در پارکینگ خودروسازها اعلام شد
همدلی در صنعت خودرو و قطعهسازی وجود ندارد
نباید پس از چهل سال یارانه دادن به خودروسازان به اینجا می رسیدیم
باید از تجربه صنعت دفاعی در خودروسازی استفاده شود
طراحی پلتفرم راه نجات خودروسازان از مونتاژکاری
کاهش هزینه و رشد بهرهوری با بومیسازی قطعات خودرو
صنعت خودروسازی با روندهای مشکوک همراه است
بررسی طرح ساماندهی بازار خودرو در هیأت عالی نظارت مجمع
دقیقاً "کمبود قطعه " از مهمترین مشکلات صنعت خودروسازی است
فرمان خودروسازی در دست دولت
ضرورت تدوین دستورالعمل محاسبه قیمت خودرو در شرایط خاص
آیا تفاوتی میکند صاحب ایرانخودرو چه گروهی باشد؟
به داد صنعت خودرو برسیم
تصمیم قطعی برای واگذاری سهام خودروسازی؟
رونمایی از تایرهای بدون هوا برای خودروهای معمولی
کیا اِستینگر GTS چه مشخصاتی دارد؟
جریان شناسی یک گرونگانگیری خیالی در خودروسازی
چرا خودروساز اصرار به تولید خودرو ناقص دارد؟
حمالهای خودروساز را بشناسید
زیان صنعت خودرو از عدم ثبات در آیین نامه ها و سیاست های دولتی
وزارت دفاع به کمک خودروسازان میآید
حل60درصد مشکلات چهارچرخها با حذف تصدیگری دولت
طرح ساماندهی خودرو، نسخه صنعت را می پیچد
وقتی ریش را به سِبیل پیوند میزنند
بازگشت قیمتهای اینترنتی خودرو
افت تولید وتجارت خودرو
دستور وزیر صمت به دو معاون خود درخصوص صنعت خودرو
150 هزار دستگاه خودرو ناقص در پارکینگ خودروسازان خاک میخورد
خرداد پرحادثه در انتظار صنعت خودرو
صنایع دفاعی میتوانند مشکلات خودروسازان را رفع کنند
همکاری مشتری و خودروساز در ساخت خودرو
2 فاکتور تحقق شعار رونق تولید در صنعت خودرو
تولید40 هزاردستگاه محصولات ایران خودرو از ابتدای سال 98 تاکنون
ربات پلیس امنیت جادهها را تضمین میکند
نگاه دولتی به صنعت خودرو باید کنار گذاشته شود
کارخانههای سفینهسازی
یک بام و دو هوای وزارت صنعت در کنترل قیمت خودرو
4 ضرورت برای تحقق شعار رونق تولید در صنعت خودرو
مقامات قضایی به تخلفات خودروسازان ورود کنند
رسوب بیش از 100 هزار خودرو ناقص در کف کارخانجات
رونق تولید خودروسازان نیازمند برنامه ملی است
قطعه و مواد اولیه چقدر از قیمت خودرو را تشکیل می دهند؟
برنامه تولید 1.200.000 دستگاه خودرو محقق میشود!؟
پورشه چطور به جایگاه فعلیاش رسید؟
نزول صنعت خودرو ایران به رتبه 18 جهان با افت 40 درصدی تولید + جدول
سرمایهگذاری خودروسازان بزرگ برای ساخت خودروهای برقی
خودروسازان با فروش اموال خود به دنبال جبران زیان هستند
همسرم بی گناه است
رفتارها تغییر نکند؛ خودتحریمی غالب میشود
«فروش اموال مازاد» و «بومیسازی قطعات» صنعت خودرو را نجات میدهد؟
دولت پای خود را از صنعت خودرو بیرون بکشد
ثبت بینالمللی اختراع محقق دانشگاهی در حوزه صنعت خودروسازی
هراس متولیان صنعت خودروی کشور از ورود فارغالتحصیلان علوم پایه
بخش خصوصی، حلقه مفقوده صنعت خودرو
سهم دولت از تولید خودرو
حرکت خودرو در جاده سنگلاخ تولید
صنایع خودروسازی با استفاده از چرم مصنوعی به جای واقعی کنار میآیند
مدیری که پژو را از ورشکستگی نجات داد
ابرچالشهای خودرو در سال 98
مقابله هوشمندانه با تحریمها ادامه دارد
وقایع نگاری خودرو در سال 97
مدیریت صنعت زیانده خودرو با جذب سرمایههای سرگردان
نگاههای متناقض به صنعت خودرو، دردسرساز میشود
برترین و بدترین برندهای خودرویی 2019
تشریح روند تحقیق و تفحص از صنعت خودرو کشور توسط رییس هیات
ضرورت حفظ ارتباطات تجاری از سوی دولت در سال جدید
انتظار داشتیم موتورسیکلتهای ایرانی به بازار عرضه شود
تحلیلی بر صنعت خودرو و حملونقل جهان
فرصتها و بحرانهای صنعت خودروسازی در سال 97
من هرگز سوار خودرویی نمی شوم که کامپیوتر هدایتش می کند!
دستهای پشت پرده از فعالیت شرکتهای خودروسازی معتبر دنیا در ایران جلوگیری کردند
دومینوی دردسرهای صنعت خودروسازی تمام شدنی نیست
علوی: فرآیند ثبت نام خودرو دارای ابهام و نقص است
تکنولوژی خودروهای خودران چیست؟
سازنده لیموزین پوتین در نمایشگاه ژنو
خودروهای چینی بازار خودروهای کرهای را کساد کردند!
عدم تشخیص تیرهپوستان توسط خودروهای خودران
2 خودروساز بزرگ کشور امسال چقدر کاهش تولید داشتند؟
افزایش روند تولید خودرو
دولت در بحث خودروسازی دچار تعارض منافع است
پژو مزد رفتن از ایران را گرفت
خودروسازی کشور غیرشفاف و غیرقابل نظارت است
صنعت خودروسازی محتاج تفکر حاکم بر حوزه موشک/ سپاه ورود میکند؟
پراید گران نیست، با قیمتهای بالاتر صادر میکنیم
پاشویه تب بازار
عبور تولید روزانه ایران خودرو از مرز 2100 دستگاه خودرو
خودروسازی را فکر زمستان نبود
از حضور وزارت دفاع و سپاه در صنعت خودروسازی حمایت میکنیم
قیمت خودرو با عمل به وعده خودروسازان کاهش می یابد
خودروسازی کشور مدیریت آینده نگر ندارد
شرکتهای خودروسازی ارادهای برای استفاده از تکنولوژی روز ندارند
آیا با افزایش قیمت خودرو، کیفیت اتومبیلهای داخلی ارتقاء پیدا میکند؟
صنعت خودروی ایران در چهل سالگی انقلاب چه جایگاهی دارد؟
زشتترین خودروهای جهان کدامند؟! +تصاویر
تسهیلات، دوای درد خودروسازی است؟
ریشه رفت وآمد مدیران در خودروسازی
رکوردهایی که شکسته شد
چرایی عقب افتادن خودروسازان از تعهدات
مدیرعامل سایپا به دلیل افزایش بیرویه قیمت خودرو تغییر کرد
توقف خط تولید خودروهای کم تیراژ پس از تحریم
جاده یک طرفه دولت در صنعت خودرو
جلوگیری ازخودتحریمی و حمایت از قطعهسازان بزرگ برابرحاشیهسازیها
سایپا بهترین غرفه نمایشگاه شد
آرزوهای بزرگ در خودروسازی
یک کارشناس صنعت خودرو پیشنهاد کرد:ضرورت ترسیم نقشه راه خودکفایی در صنعت خودرو
دولت دست از سر خودروسازان بردارد
صنعت خودرو بین دو تحریم
عضو کمیسیون صنایع مجلس: 25 درصد مشکلات صنعت خودرو ناشی از تحریم ها است
کلنگ ساخت«گیگافکتوری» تسلا در چین زده شد
خودروسازان 7500 میلیارد تومان ضرر دادند
عواقب چرخش «کونلون بانک» برای خودروسازی
جبران زیان های ارزبری صنعت خودرو با افزایش قیمت
بهترین خودروهای سال 2019 از نگاه موتورترند
تولید جهانی خودرو در سراشیبی سقوط
تلاش GAZ برای معافیت از تحریمها
انتظارات غیرمتعارف چالش اصلی صنعت خودرو
اصلاح صنعت خودروسازی نیازمند 2 سال زمان است
اکنون زمان انتقاد به صنعت خودرو نیست
تمرکز بر فناوری ها راه ماندگاری صنعت خودرو در شرایط تحریم
مقصر مشکلات صنعت خودرو کیست؟
ایمنترین خودروهای جهان کدامند؟
تولید بیش از 670 هزار خودروسواری در 8 ماهه امسال
لوگوی BMW چطور طراحی شد؟!
خودروسازی قربانی سیاستگذاری
صنعت هزار چالش
آغاز خزان خودروسازی
نیسان خودرویی با ارزش 1.1 میلیون دلار تولید میکند +تصاویر
از سنسورهای ABS در چه سیستم های دیگری استفاده می شود؟
ایمنترین خودروهای 2018 اعلام شدند
خطر توقف خط تولید خودرو جدی است
کارگران ایران خودرو آبروی صنعت کشور هستند
بنگاهداری خودروسازان نوعی هزینه کردن از جیب مردم است
راه نجات صنعت خودروسازی چیست؟
راهکارهای حمایتی اما غیر مستقیم دولت از صنعت خودرو
آیا خودروسازان «خودرو» میسازند؟
-
ساخت 2 واحد خودرو دامغان در سفر رئیس جمهوری آغاز می شود
راهحلی برای رهایی خودروسازان از مشکلات
تداوم تولید خودرو در گرو تأمین تسهیلات 30 هزار میلیارد تومانی خودروسازان
گروههای فنی و مهندسی برای جانمایی کارخانه تولید خودرو در قم مستقر شدند
ورود خودروسازان به محدوده قرمز تولید
قیمت سیستم صوتی و تصویری خودرو +جدول
هزینه پخش خودرو چقدر است؟
خودروسازی ، داروسازی و ریسندگی سه قطب سرمایهگذاری در سمنان
هشدار نسبت به نابودی خودروسازان و قطعهسازان
آخرین تکنولوژی خودروی جهان در نمایشگاه چین +عکس
توجه به صنعت خودرو از راهکارهای مقابله با مشکلات اقتصادی است
امیدواری خودروسازان به لغو افزایش تعرفههای واردات خودرو
قانونی برای منع واردات خودرو وجود ندارد
سهام دولت در خودروسازیها به صفر برسد
از ابتدای دیماه چه اتفاقی برای خودروها رخ میدهد؟
ضرر 5000میلیارد تومانی ایرانخودرو و سایپا طی شش ماه
کدام خودروها به لطف طولانی نشدن دوره مونتاژ، در بازار خودرو ایران عزیز ماندهاند؟
نارضایتی جامعه از اوضاع تولید و عرضه خودرو
زیرساختهای خودروسازی و استاندارد آلایندگی به طور کامل فراهم نشده است
بدهی 20 هزار میلیارد تومانی ایرانخودرو و سایپا به قطعهسازان
پرداخت تسهیلات یک میلیارد دلاری به خودروسازان و قطعهسازان
اثر معکوس تثبیت قیمت در بازار
قیمت قطعات خودرو با وجود گرانی مواد اولیه، رشدی نداشته است
قطعات خودروهای CKD تامین شده است
رقم زیان خودروسازان قابل قبول نیست
حذف قیمتگذاری و پرداخت مابهالتفاوت در دستور کار وزیر جدید صمت
نقشه راه هیات تحقیق و تفحص از علل ناکارآمدی صنعت خودرویی کشور تهیه شد
برلیانس H220 اتوماتیک را بشناسید
مکانیزمها به زبان ساده؛ سیستم کروز کنترل
افزایش قیمت خودرو در کارخانه کارشناسی شود
از تحول در حوزه خودرو تا مقابله با فساد سازمان یافته
کارنامه نیمسال خودروسازان در دست چپ
سازمان استاندارد در مقابل خودروسازان کوتاه نمیآید
درصد مردودی خودروها در تست آلایندگی
رونمایی از لامبورگینی ایرانی بازتاب زیادی در ایتالیا داشت
استانداردهای 85گانه مطابق با ایران نیست
تولید دوربین برای خودروهای خودران با الهام از میگو
صادرات صنایع خودرو سازی ترکیه در نه ماه گذشته به 23.4 میلیارد دلار رسید
نقاط عطف «خودرو» در ربع قرن اخیر
پیشنهادی برای کاهش هزینهها در خودروسازی
طرح اولیه تقاطع هوشمند خیابان آزمایش می شود
تحریم صنعت خودرو بهترین فرصت برای ایران خودرو و سایپا
مشتری مداری خودروسازان خارجی درسی برای خودروسازان ایرانی
مافیای خودروسازی سد راه ورود تکنولوژی خودروهای هیبریدی به کشور
«فن بدل» خودروسازان به تحریمها
کاهش 50 درصدی تولید قطعه سازان
بررسی کشنده هیوندای Xcient، سفیر سنگین وزن کره ای ها
نقش پلتفرمهای ملی در خروج از بحران
خودروسازان برای ایجاد ثبات در بازار نقش بنگاههای اقتصادی را ایفا کنند
اینترنت اشیا؛ شاه کلید صنعت خودروسازی در آینده
تولید تجاریسازان زیر ظرفیت
پاسخگویی به ابهامات خودرویی
تاراکو، بزرگترین سئات شاسیبلند
تلاش برای اصلاح مصوبه تسهیلات هزار میلیارد تومانی خودروسازان
مکانیزمها به زبان ساده؛ سیستم فن برقی
ایمنی خودرو به زبان ساده؛ چرا نمیتوان ایمنی خودروهای مختلف را با هم مقایسه کرد؟
شرایط آزادسازی قیمت خودرو هنوز فراهم نیست
پراید کمتر از 32 میلیون ضررده است!
اولویتدهی به تجار خوشنام برای واردات مواد اولیه
آشنایی با کلاچ فن، نحوه کارکرد و انواع آن
کدام خودروهای موفق، در حالی که هنوز مشکلات عدیدهای داشتند، راهی خط تولید شدند؟
ایمنی خودرو به زبان ساده؛ با مفهوم ایمنی آشنا شویم
معرفی خودروهایی که در ایران تولید شدند، اما امروزه کمتر در یاد ایرانیان باقی ماندهاند
محرومیت قطعهسازان از دریافت ارز دولتی
خودروسازان به تعطیلات رفتند
مروری بر محصول X6 جیناف و ویژگیهای فنی آن
بدترین مفهومیهای تاریخ
خودرو X7 سری M، آفرودر خانوادگی بامو +عکس
خودروسازان 5 ماه فرصت استانداردسازی خودروها را دارند
راهکاری برای جبران نقص قطعات
خودرویی که با هوا راه میرود +تصاویر
گفت و گوی صمیمانه معاون بازاریابی و فروش ایران خودرو با مشتریان
عضو کمیسیون صنایع مجلس: نمایش محصولات جدید در نمایشگاه خودرو مشهد بیانگر تداوم توسعه صنعت خودرو است
معرفی باسابقهترین خودروسازانی که چندین دهه متوالی در بازار ایران حاضر بودهاند
برآیند مثبت هفتگی گروه خودرو
عیب یابی خودرو به زبان ساده؛ شناسایی عیوب بر اساس هشدار اعلامی (بخش دوم)
آشنایی با خودروهای مفهومی اتحاد جماهیر شوروی
خودروهای چینی گزینه مناسب خرید در بازار فعلی
بی اثر کردن تحریم ها در صنعت خودرو با دو اقدام عملیاتی
پایان مرداد آخرین موعد اعلام شده برای پرداخت تسهیلات صنعت خودرو
مشکلی برای تولید خودرو تا پایان سال نداریم
احتمال بیکاری 700 هزار شاغل صنعت خودرو و قطعه
افزایش 9.8 درصدی تولیدات خودرو در کشور
استقبال تایلند از خودروهای برقی
معروفترین مهندسان خودرو را بشناسید
معرفی خودروهای آمریکایی که با وجود نامی نوستالژیک، سنتشکنی کردهاند
آشنایی با شاخصترین آثار مفهومی خانه طراحی Bertone
باید از سایپاپرس حمایت همه جانبه شود
عوامل موفقیت صنعت خودروسازی در جنوب شرق آسیا
درآمد صرفهجویی سوخت در چرخه خودروسازی
لورفتن اسرار دهها خودروساز معروف جهان با یک اشتباه رایانهای
تحریمهای داخلی علیه خودروسازی
ایمنترین خودروهای سال 2018 معرفی شدند
انتخاب شریک خارجی از سوی صنعت خودرو نیازمند شرایط سیاسی مساعد است
خودرو در قلب جنگ تجاری
پیشرانههای دوزمانه و چهارزمانه چه تفاوتها و چه ویژگیهایی دارند؟
موج بیکاری در انتظار صنعت قطعه
آغاز به کار ستاد تشدید مبارزه با احتکار از 23 تیرماه
سه عامل مهم در افزایش فروش خودروهای برقی در جهان
ناتوانی زنجیره تامین، افت تیراژ خودروسازان را رقم زد
محل قرارگیری پیشرانه و اثر آن در خوشدستی خودرو
گروه بهمن حامی مطمئنی برای شرکت های بزرگ صنعت پخش
آشنایی با گیربکس CVT و اصول کاری آن
بررسی خودروهایی که در نسلهای اخیر، مشتریان متفاوتی را جلب کردهاند
معرفی برترین برابوس های 4 دهه اخیر
شناختی از برخی ویژگیهای خاص خودروهای تجاری
پیشنویس سند توسعه صنعت خودروسازی در استان سمنان تدوین میشود
خودروسازی داخلی از حمایت ویژهای برخوردار است
اهرم فشارهای داخلی قویتر از تحریم خارجی است
آشنایی با خودروهای مفهومی پرنده
معرفی تیونرهایی که بعدها به خودروسازی مستقل بدل شدند
خودروسازی رولز رویس بیش از 4 هزار نفر را اخراج میکند!
پژو مدل1008 را روانه بازار میکند +عکس
نوآوری در صنعت قطعه قربانی قیمت گذاری دستوری شد
معرفی خودروهایی که طراحی بیرونی آنها در ابتدا برای برند دیگری انجام شده بود
قطعه 30 درصد گران خواهد شد
برخورد سیاسی با صنعت خودرو
ابزار تشویقی یا تنبیهی برای خروج پژو؟
پیشرفت 90درصدی بزرگترین طرح ارتقا کیفیت خودرو خاورمیانه
قیمت انواع دستگاه پخش خودرو + جدول
باید خودروهای داخلی را آسیبشناسی کنیم
خودرو زیر 10 میلیون تومانی تولید می شود
ساخت خودروی دوچرخ چینی با الهام از فورد 1961
12 باور نادرست از خودروها
تراز ارزی، لازمه توسعه صنعت خودرو در شرایط تحریم
یک بام و دو هوای طرح خودرویی مجلس
خودروسازان ملزم به پیشفروش با قیمت مصوب سازمان حمایت شدند
سیاستگذاری سهگانه برای افزایش کیفیت خودرو
گروه بهمن از تیم ملی فوتسال بانوان تقدیر کرد
موجودی انبار قطعه سازان رو به اتمام است
نگاهی به محصولات تولید محدود روزهای اخیر
مرگ تدریجی ارزانقیمتها
معرفی خودروهایی که توسط یک کمپانی طراحی اما تحت برندی دیگر معرفی شدند
معرفی خودروهایی که لامبورگینی در تولدشان نقش داشته است
بررسی پرکاربردترین سیستمهای ایمنی فعال در خودروهای امروزی
شماره ششم «خودروامروز» دیجیتال منتشر شد
از بطن جامعه تا دفتر خاطرات
پتروشیمی و خودروسازی دو بال توسعه صنعتی در خمین
توسعه فناوریها؛ افزایش فراخوانها
پاتک خودروسازان به تحریمهای جدید
معرفی خودروهای کانسپت دهه 50 با الهام از جتهای جنگنده
داخلی سازی راه نجات صنعت خودرو از تحریم ها
-
خودروسازان محدود به مونتاژ نشوند
توافق 500 میلیون دلاری برای طراحی خودرو توسط یک شرکت چینی
تحریم ها تمرین خوبی برای صنعت خودرو
امکان احتکار خودرو از سوی خودرو سازان وجود ندارد
خودرو، یعنی فولاد متحرک
روند تولید خودروهای ملی تسریع شود
شروع مثبت خودروسازان
رشد تولید خودرو ادامه دارد
عملکرد خوب خودروسازان ایرانی در مقابله با تحریمها
صنعت خودرو از "پلتفرم ملی" غافل نشود
دو سناریوی «خودرو» پس از نقض برجام
آینده طلای سیاه با توسعه خودروهای برقی چه می شود؟
شماره چهارم «خودروامروز» دیجیتال منتشر شد
ضرروت اعلام واقعی هزینه های حاکم بر صنعت خودرو
بازه زمانی راهکاری برای واگذاری تعیین قیمت به حاشیه بازار
پاکهای امروز؛ کلاسیکهای فردا
گفتوگو با مدیرعامل شرکت بازرگانی البرز در نمایشگاه اتومکانیکای دوبی
گزارش تصویری از آخرین روز نمایشگاه اتومکانیکای دوبی
گزارش تصویری از فعالیت صنعتگران خودرو در اتومکانیکای دوبی 2018
برترین فضاهای داخلی در خودروهای 2018 +تصاویر
طرح تحقیق و تفحص از صنعت خودرو به صحن مجلس ارائه میشود
گزارش تصویری از حضور شرکت های تایرسازی در نمایشگاه اتومکانیکای دوبی
پژو به دنبال داخلی سازی محصولات خود است؛ نه رفتن
بازوی هوشمند
قدرت هوا
محبوبیت هاوال کار دستش داد
بزرگِ یک خانواده
ثبتنام اینترنتی برای بازدید از نمایشگاه اتومکانیکای دوبی
6 خودروی جدید وارد بازار ایران می شود
مرز حمایت دولت از خودروسازی کجاست؟
صنعت خودروسازی کشور باید به سمت خصوصی سازی حرکت کند
ایجاد انحصار برای خودروسازان با استفاده از تعرفه سنگین واردات
شرط 3 سال ساخت برای واردات خودرو
اتحادیه اروپا حامی مصرفکنندگان محصولات شرکتهای خودروسازی در قبال شرکتهای متقلب
احتمال افزایش هزینه ها در صنعت خودرو
افزایش 15 درصدی تولید خودرو در سال 96
5 عدد مهم هفته آخر فروردین در جهان خودرو
مهمترین ابداع صنعت خودروسازی پس از کمربند ایمنی
صنعت خودروسازی درگیر دست اندازهای تعرفههای واردات خودرو
ساخت ماشین جنجالیِ اتانازی توسط پزشک استرالیایی!
بررسی و تحلیل وضعیت عوامل موثر بر مدیریت تحقیق و توسعه و رتبه بندی عوامل با تکنیک ANP در صنایع خودروسازی
اجرای دو استاندارد اجباری در سال 98
دو محرک صادراتی خودرو
تولید و عرضه وانت تندر90 با 50درصد داخلی سازی
قطعهسازی ترکیه و درسهایی که باید از آن آموخت
خودرو، تنها صنعتی که در کشور صاحب قانون است
چرا XC60 بهترین خودروی سال جهان است؟ (+عکس)
جایگاه ایران در بین غولهای خودروساز
بازگشت به عقب خودروسازی آمریکا
در آخرین جلسه شورای سیاستگذاری خودرو چه گذشت؟
ناکامی «شروط خودرویی» در پسابرجام
تولید خودرو در انگلیس کاهش یافت
ایران شانزدهمین خودروساز جهان شد + جدول
صنعت خودرو سال 96 را چگونه سپری کرد؟
رنج صنعت خودرو از بیماری مزمن دخالت دولتی
نیمنگاه دوباره کیا به جایگاه بزرگان
کانسپتهای فراموششده
عقب نشینی گروه خودرو به کانال 15 هزار واحدی
نخستین محصول پسابرجامی رنو تابستان امسال در ساوه تولید می شود
مونتاژ قطعات خارجی در قالب تولید داخلی خیانتی نابخشودنی است
حمایت از کالای ایرانی یک هدفگیری عالمانه است
پاکترین خودرو جهان را بشناسید +عکس
رونمایی از خودروی هیوندای اکسنت جدید شرکت کرمان موتور
جای خالی فناوری اطلاعات در صنایع خودروسازی
علاقه به انحراف
انجام معاملات بلوکی، روزی سبز را در گروه خودرو رقم زد
تولید 18 خودرو با درجه کیفی 4 ستاره در بهمن ماه امسال
سایپا هدف تولید امسال خود را محقق می کند
مرور مهمترین اخبار صنعت خودرو / بهمن 1396
مرور مهمترین اخبار صنعت خودرو / دی 1396
مرور مهمترین اخبار صنعت خودرو / آذر 1396
مرور مهمترین اخبار صنعت خودرو / آبان 1396
مرور مهمترین اخبار صنعت خودرو / مهر 1396
مرور مهمترین اخبار صنعت خودرو / شهریور 1396
مرور مهمترین اخبار صنعت خودرو / مرداد 1396
مرور مهمترین اخبار صنعت خودرو / تیر 1396
مرور مهمترین اخبار صنعت خودرو /خرداد 1396
مرور مهمترین اخبار صنعت خودرو / اردیبهشت 1396
مرور مهمترین اخبار صنعت خودرو / فروردین 1396
ورود محصول ارزان رنو به ایران
تاریخچه کمپانی ژاک ساوتشیک؛ آمیزه هنر و صنعت
اولویت زنجیره خودروسازی برای تزریق سرمایه
معرفی 3 خودرو قویتر از 500 اسب بخار و ارزانتر از 100 هزار دلار
راه و چاه تقاضا در بازار خودرو
سریع ترین خودروی الکتریکی طراحی شد
سایپا به دنبال داخلی سازی 50 درصدی خودروهای جدید است
سایپا به مدار تولید بازگشته است
با پیشرانههای بدون میلسوپاپ و سیستم FreeValve آشنا شوید
نگاهی به مجموعه دریچه گاز خودرو و انواع آن
روند تغییر «نسبت واردات خودرو به تولید»
سال نو، چهره نو
نگاهی به Rimac Concept One، سردمدار سوپراسپرتهای برقی
نگاهی به گرانترین خودروهای هیبرید دنیا؛ بالانشینهای کممصرف !
زره پوشی به نام گاردین
نتایج نظرسنجی مصرفکنندگان خودرو اعلام شد
تسلا به رکورد تولید 300هزار خودرو در سال رسید
ایران خودرو 10 هزار دستگاه خودرو صادر می کند
خواب آشفته صنعت خودرو
دریافت لوح و تندیس سیمین صنعت سبز کشور توسط شرکت سایپاسیتروئن
توقف تولید 500 مدل خودرو در چین
ادامه افزایش تیراژ خودروسازان خصوصی
استفاده از «تخصص خارجی» در خودروسازی
آیا عنصر زیبایی از جهان خودرو رخت بسته است؟ مرگ تدریجی زیبایی
تولید محصول2008 ادامه دارد
معرفی مشهورترین و خاصترین خودروهای اسپرت ژاپنی در کلاس Kei؛ جادوی کِی
آشنایی با چند ویژگی کمکی خودروهای خودران و نیمهخودران
نگاهی به کمترین و بیشترین پرداختی برای به دست آوردن هر واحد اسب بخار؛ هر اسب بخار چند دلار؟!
بررسی آپشن خودروهای خاص و گرانقیمت
آنچه که احتمالا در مورد نسل جدید استونمارتین ونتیج نمی دانید؛ 10 نکته از همزاد انگلیسی AMG GT
بررسی تکامل خودروهای دودیفرانسیل لامبورگینی از دهه 80 تا ابتدای قرن بیستویکم
ارزانفروشهای موفق در صنعت خودرو
افزایش نرخ تورم تولیدکننده خودرو
تداوم روند صعودی تولید خودرو
پیشرانههای امروزی چه تفاوتهایی با پیشرانههای قدیمی دارند؟
مهندس یکه زارع به اشاره به برگزاری پنجمین همایش صنعت خودرو تاکید کرد؛ استفاده صنعت خودرو از فن آوری های نو
سرمایهگذاری در صنعت خودرو چقدر است؟
نقاب جدید کوچکترین بنز
موفقیت ایساکو در کسب استاندارد ایزو 10015
7 نکته مهم برای سالمتر ماندن خودرو تقویتشده شما؛ هفت خوان قدرت
آشنایی با برند فارادی فیوچر؛ تولیدکننده خودروهای الکتریکی
معرفی و بررسی مکانیسم خودروهای سلول سوختی
بررسی کلی مکانیزم گیربکس اتوماتیک
نوآوریهای آمریکایی
5 سوپراسپرت ناموفق در تاریخ؛ لشکر شکستخورده
تیغ دولبه استانداردهای جدید؛ خودروسازان درگیر توقف تولید با اجرای استانداردهای جدید
میتسوبیشی با سبد کامل محصولات 2018 در گرگان
آغاز فعالیت هشتمین نمایشگاه گلستان
گزارش تصویری از افتتاحیه نمایشگاه خودرو گلستان
مدرسه ساخت خودروهای پرنده افتتاح می شود
واردات خودرو 51 برابر صادرات آن
توسعه صنعت قطعهسازی با اجرای سهم 40درصدی داخلیسازی
رونق بازار خودرو با حمایت مردم و افزایش کیفیت محصولات
آشنایی صنعت خودروسازی با شرکتهای دانش بنیان و فناوران
سوئد اتوبوس های خودران الکتریکی آزمایش می کند
جنرال موتورز 10 میلیارد دلار زیان کرد
چشمانداز صنعت خودرو در سال 2018
بازار خودرو کانادا در تسخیر سامورایی ها
استون مارتین 2019 Vantage؛ نقطه آشنایی با استونمارتین
آشنایی با مراحل طراحی رینگ خودرو؛ کفش فولادی
خودرو مخوف بتمن
میزان تولید 2008؟
آغاز برنامه خودروسازی مشترک بین ایران و بلاروس
تولید خودرو برقی، مسیر میانبر توسعه صنعت خودرو
تولید برقیها نیازمند برنامه دولت
بسته حمایتی برای توسعه برقیها
بازگشت باشکوه کاپیتان سانگ یانگ به ایران
ارتقای روند کیفی خودروهای داخلی
بررسی سیستم تشخیص فرامین اشاره ای بامو در سیستم های صوتی؛ چشم به فرمان!
تولید چند سواری متوقف شد
15 حقیقتی که احتمالا در مورد جگوار نمیدانستید؛ نادانستههای جگوار
کسب بالاترین میزان رشد رضایت مشتریان توسط سایپا یدک
تولید 218 هزار تن روغن موتور و صنعتی در 6 ماهه امسال
شبکه خدمات پس از فروش خودرو در کشور باید توسعه یابد
فولکس واگن بزرگترین تولید کننده خودرو جهان شد
افزایش 16.1 درصدی تولید انواع خودرو در 9 ماهه 96
تداوم روند صعودی تیراژ خصوصیها
یادبود مکلارن برای یک راننده افسانه ای
نقاب و نام تازه برای کراساوور لوکس آمریکایی
ملاقات با داج چلنجر 1974؛ نقطه تلاقی!
مرسدس بنز 2018CLS Class ؛ CLS کلاس، برداشت سوم
سهم ایران از کسبوکار آتی صنعت خودرو
قطعهسازی، بهانه ماندگاری خودروهای قدیمی
مدیر ارتباطات جدید ایرانخودرو منصوب شد
استانداردسازی، کلید حذف تدریجی خودروهای قدیمی
هشتمین نمایشگاه بین المللی خودرو، قطعات و تجهیزات وابسته کرمان با حضور رئیس اتاق بازرگانی افتتاح شد
شرایط جدید فروش نقدی و اقساط Vela V5
عامل رهایی فنر قیمت خودرو
گزارش تصویری آخرین روز نمایشگاه خودرو ساری
پورشه و جگوار هم به تولید خودروهای برقی پیوستند
ردیابی الگوی ترکیه و کره در ایران
جشنواره ای برای فرهنگ سازی در صنعت خودرو و پیوند صنعت و هنر
تحلیلی بر صنعت خودرو ترکیه
دو مسیر خروج خودروسازان از سهامداری
آشنایی با انواع سیستمهای هیبرید؛ ولتاژ، سوخت، حرکت!
عیبیابی خودرو به زبان ساده ؛ وقتی درجات دروغ میگویند
گزارش تصویری آماده سازی نمایشگاه خودرو ساری
تشریح برنامه های رنو پارس در ایران
پوپولیسم خودروسازی
گزیده اخبار روزانه پایگاه خبری «عصر خودرو» (28 آذر 96)
گزیده اخبار روزانه پایگاه خبری «عصر خودرو» (27 آذر 96)
رونق مونتاژکاری در صنعت خودرو
مرسدسبنز با CLS جدید جادهها را در نوردید +عکس
طراحی خودرو در ایران امکانپذیر است!
پرچمدار پیشرو فرانسوی
طرح اولیه برای دستگاه اتوماتیک فروش خودرو در چین
خودرو ملی هنوز در کشور طراحی نشده است
توافق خودرو در برابر پنیر
احضار روح یک ایتالیایی اصیل
بهترینهای صنعت خودرو در لباس پلیس!
نفع چهارگانه فروش سایتهای شهرستانی خودرو
امضای تفاهم نامه تولید قطعات خودرو بین ایران و کره جنوبی
صنعت خودرو به کارگروه فرهنگی- هنری نیاز دارد
بازگشت سنا به جاده
آمار تولید خودروسازان خصوصی در هشت ماه امسال
ابر خودرو هیبرید آمریکایی با نامی ایرانی
رویای صادرات یک میلیون خودرو
گزارش جدید از کیفیت خودروها
استرسبار یا میله تعادل در خودرو چیست؟
رنجروور اسپرت 2018؛ تنها 2.8 لیتر در 100 کیلومتر!
مک لارن Ultimate Vision GT؛ ابرخودرویی که از 2030 آمده
جایگذاری و شمارش کیسههای هوا به چه صورت است؟؛ آرایش کیسههای نجات در خودرو
ابرخودرویی 920 اسبی از کانادا!
ارتقای سیستم صوتی خودرو چقدر آب می خورد؟
وقتی خودرو را قبل از خرید پرو میکنید!
تب داغ زودگذر گروه خودرو
-
تولید خودرو رکورد میزند
تولید 9 خودرو سبک و 4 خودرو سنگین با درجه کیفی 4 ستاره در آبانماه امسال
ارتقای سیستم صوتی خودرو چقدر آب میخورد؟
نزدیکی خودروسازان به رکورد 90
دبیر اجرایی پنجمین همایش بین المللی صنعت خودرو منصوب شد
سه محرک رشد در گروه خودرو
چشمانداز تازه هیوندای
خودروسازی روی موج بلاتکلیفی
رشد سهام خودروییها در بورس تهران
حمایت کمیسیون صنایع مجلس از خصوصی سازی واقعی در صنعت خودرو
نمره خودرو در کارنامه 100 روزه دولت
رشد و توسعه متناسب زنجیره تامین با فناوری های روز دنیا نیاز اساسی خودروسازان است
الگوی کره یا ترکیه؟
تولید کنندگان داخلی برای تولید خودروهای هیبریدی سراغ شرکای قدرتمند خارجی بروند
سمفونی چَشمها در شهر آفتاب!
در چهارمین روز برگزاری دومین نمایشگاه خودرو تهران؛ اسپری آبگریز خودرو و موتورسیکلت نانووا رونمایی شد
پرچمدار DS در ایران رونمایی شد
رشد صعودی واردات قطعه
تانک 2018 رضوانی؛ شبیه به یک نفربر زرهی!
قطبنمای کرهای صادرات خودرو
این ویزور دوچرخه سواری 98 درصد اشعه های مضر را دفع می کند
دبیر انجمن خودروسازان ایران: سایپا دست پر به نمایشگاه آمده است
گزارش تصویری از گشایش دومین نمایشگاه خودرو تهران
نگاهی به وضعیت قطعات یدکی مکلارن F1 ؛ لباس نو برای پیرمرد 25 ساله!
نسخه جهانی توسعه خودروسازی ایران
شهردار و معاونان وزیر، روبان دومین نمایشگاه خودرو تهران را می بُرند
تکنولوژی هایی که صنعت خودرو را متحول کردند
صنعت خودروی جهان در سراشیبی
همراهان خودرو امروز در اینستاگرام از مرز 200 هزار نفر گذشتند
مقایسه هزینه تحقیق و توسعه صنعت خودرو در ایران و جهان
تغییر مدیرعامل سایپا ربطی به وزارت صنعت نداشت
فناوری جدید استفاده از خودروهای هیدروژنی را همه گیر می کند
پایگاه خبری «عصرخودرو» 8 ساله شد
در همکاری های جدید خود استراتژی برد- برد را دنبال می کنیم
ظهور پدیده سقفهای شناور
بررسی پروسه طراحی و ساخت نسل اول مزدا MX-5 میاتا؛ به نام ژاپن، با طعم انگلیسی به کام جهان!
مروری بر زندگینامه حرفه ای کریس بنگل؛ خالق طرحهای ماندگار
نمادهای خودرویی چگونه خلق میشوند؟
عرضه خودروهای برقی داخلی تا 4 سال آینده
گزارش تصویری بازدید وزیر صنعت، معدن و تجارت از غرفه سایپا
تکنولوژی حرف اول فروش خودرو در دنیا
مرد هزار چهره ایسوزو
کارنامه سرمایه گذاری خارجی خودروسازان در 6 ماهه ابتدای سال جاری
ایران میتواند هاب قطعهسازی منطقه باشد
پیوستن خودروسازی ایران به قافله برقیها
کامیونهای خودران؛ انقلاب در صنعت حملونقل
قدرتمند ترین و سریع ترین کوروت تاریخ
ارزش افزوده خودروسازی چین در ایران
گزیده اخبار روزانه پایگاه خبری «عصر خودرو» (23 آبان 96)
نگاهی به Anthem، جدیدترین محصول بزرگراهی ماک ؛ تغییر دهنده معادلات بازار
پرونده ادغام خودروسازان باز شد
تاخیر دوباره در اعلام گزارش کیفی خودروهای داخلی
تولید برقیها با مشارکت خارجی یا کنسرسیوم داخلی؟
اثرات نظام تعرفه ای جدید در صنعت خودرو
سه سنگ بزرگ در مسیر داخلیسازی خودروها
روند کاهشی نرخ تورم خودرو
نگاهی به چند روش متداول تقویت پراید؛ گرگی در لباس میش
بررسی آپشنهای داخل پنل میانی پورشه پانامرا؛ تکنولوژی به زبان پورشه
بررسی تغییرات آپشنی خودروهای وطنی در گذر زمان؛ رنسانس ایرانی
کمی تازگی برای Z سالخورده نیسان
خطر حذف بیقاعده خودروهای قدیمی
بررسی آپشنهای داخل کابین بوگاتی شیرون؛ میلیونر بیادعا!
فیلتر داخلیسازی خودروهای پسابرجامی
تولید سایپا 141 در شرکت سایپا سوریه آغاز شد
نقطه جدایی خودروسازی کره از ایران
نرخ رشد تولید کرمان موتور در سال جاری دو برابر نرخ رشد صنعت خودروسازی است
اعلام قیمت تندر 90 فیسلیفت سایپا
رکورد جدید برای سریع ترین خودرو دنیا +ویدئو
راه بیپایان حمایت از خودروسازان
رونمایی از سریعترین خودرو دنیا
ائتلاف اروپایی برای خودروهای برقی
ریزنمرات خودروسازان در هفت ماه
تولید 900 هزار دستگاه خودرو در کشور طی 7 ماه
تولید خودرو افزایش یافت
حمایت گسترده دولت،خودروسازان را بد عادت کرده است
تاثیر تهدیدهای ترامپ بر قراردادهای خارجی صنعت خودرو
صنعت خودروسازی در بروزسانی موفق نبوده است
خواب آشفته صنعت خودرو
پاییز تقاضا در بازار خودرو
پدیدههای خودرویی 2018
طرح بازدید رایگان پاییزی پرشیاخودرو آغازشد+لیست نمایندگی ها
قطب سوم تولید خودرو با ظرفیت یک میلیون دستگاه راهاندازی می شود
ایمنی خودروها محور نخستین جلسه شورای سیاست گذاری خودرو بود
ملاقات با اینترنشنال هاروستر اسکات 800 مدل 1966؛ داستان زندگی این مرد سبز!
می خواهم سایت کرمانشاه را از ایران خودرو بخرم
افزایش تورم تولیدکننده خودرو در شهریورماه
هزینه نوآوری صنعت خودرو سالها پیش متوقف شد
-
الگوی چینی مالیات برای پرمصرفها
کپسول قدرت چری
حضور 48 برند خودرویی در دومین گردهمایی خودوریی ها در شهر آفتاب
هزینه تغییر چهره بازار خودرو
تازه ترین لیست قیمت انواع کامیون در بازار کشور
تازه ترین لیست قیمت انواع کشنده در بازار کشور
ماجرای عذرخواهی تویوتا چیست؟
مرجع استانداردهای خودرو تغییر کرد
سنگاپور اجازه افزایش تعداد وسائل نقلیه را نمیدهد
پنج سرعت گیر قراردادهای خارجی خودرو
عدم تقاضای داخلی، بزرگترین عامل مرگ صنعت خودرو در استرالیا
خودروسازان فرانسوی قصد رفتن ندارند
یک بام و دو هوای صادرات خودرو
تازه ترین لیست قیمت انواع کامیونت در بازار کشور
فالکن تایر در نمایشگاه اکیپ اتو 2017 از تایرهای تابستانی جدید خود رونمایی کرد
افت صادرات در پنج ماه نخست سال
مسیر فرعی تحقق «صادرات 30 درصدی»
افزایش استانداردهای خودرو بدون توجه به وضعیت اقتصادی به شکست میانجامد
تولید چند سواری متوقف شد
نگرش جدید در توسعه بازارهای صادراتی ایران خودرو
استرالیا با صنعت خودروسازی خداحافظی کرد
استانداردسازی خودروها از حرف تا عمل!
از توافقنامه هستهای با ایران حمایت میکنیم
هیوندای برای اولین بار در جهان در سان روف ایربگ می گذارد
فردی 500 میلیون تومان گرفت که راهبرد صنعت ایران را بنویسد اما ننوشت
خودروسازی آمریکا در بنبست نفتا
دلیل افزایش قیمت برخی خودروهای داخلی
شاسیبلند های ماهیندرا در راه ایران
تمام خودروهای وارداتی باید دارای استانداردهای 51 گانه باشند
-
معرفی جدیدترین نوآوری ها در اکیپ اتو 2017
انتقال تکنولوژی باید سرفصل سرمایه گذاریها باشد
اکیپ اتو میزبان دانشجویان و طراحان خودروهای خودران
اکیپ اتو پاریس 2017 آغاز به کار کرد
انجمنها، پل نمایشگاههای بینالمللی
تیبا با قیمت 12 میلیون تومان عرضه شد
دو راهی فرجام قراردادهای خارجی
بررسی سیستم اتوپارک؛ پارک خودرو از دیروز تا امروز
تداوم روند نزولی تیراژ دوگانهسوزها
نقشه راه پاکستان در انقلاب صنعت خودرو
بهانهای منسوخ برای دور زدن قانون
معرفی خودروهای آینده توسط یک شرکت ژاپنی (+عکس)
معرفی کشنده ماز با موتور خورجینی آکتروس؛ استقامت روسی و تکنولوژی آلمانی
قدرتمندترین ساخته تاریخ سئات
2018 Mercedes-Benz S-Class Coupe /Cabriolet؛ ژست تازه Sهای آدرنالینساز
2018 Bentley Continental GT؛ یک شکوه آشناپندارانه
بازگشت دوباره TVR
BMW Concept X7؛ هیبت، مبهوتِ بزرگِ Xهای بامو
سهامفروشی؛ راه میانبر توسعه خودروسازی
پراید، نوستالژیکترین خودروی ایرانی بعد از پیکان
حرکت قطعه سازان به سوی تامین مالی از بازار سرمایه
نشست شورای گفتگوی دولت با بخش خصوصی و الگوهای داخلی
رشد تیراژ خودروسازان خصوصی
تحریک تقاضا از چهار نقطه
سد دولت در مسیر ورود بخش خصوصی به خودروسازی
واردات خودرو درگیر امضاهای طلائی نشود
تداوم روند صعودی تولید خودرو
نگاهی به خودروهای اسپرت ناموفق تاریخ؛ جواهرات ناکام!
مروری بر تاثیر سیر تکامل بال عقب در خودرو و چگونگی عملکرد آن؛ آیرودینامیک خودرو به زبان ساده
خودروهای برقی تقاضای جهانی نفت را به اندازه تولید ایران کاهش میدهند
برگزاری دومین نمایشگاه خودرو تهران بطور رسمی استارت خورد
تولید خودرو 13 درصد افزایش یافت
مدل روسی عبور خودروسازی از تحریمها
موتور حمایتی دولت از خودروسازان روشن شد؟
پیشگیری بهتر از درمان!
آتشبازی در پیشرانه
این تویوتا محافظهکار نیست!
حیات وحش روی چهار چرخ
خداحافظی رسمی فراری با کلیفرنیا
«مهر عدمساخت» در دست قطعهسازان
روی پنهان حضور خارجیها با اظهارات ضدبرجامی
خودروسازان باید در تحقیق و توسعه سرمایهگذاری کنند
تداوم روند صعودی تیراژ خصوصیها
نسخه جهانی رنو برای بازار ایران
20 درصد قیمت تمام شده خودرو مربوط به تامین مالی است
حضور ایران خودرو در نمایشگاه صنعت ارمنستان
نسخه ویژه رنو برای خانواده توینگو +تصاویر
فرمان خودروهای آینده از خودرو مراقبت می کند
صنعت قطعه سازی باید احیا شود
قیمت جدیدترین سیستم صوتی و تصویری خودرو +جدول
فناوری تازه خودروها را بینا می کند
صنعت خودرو به جان مردم اهمیت دهد
شرکت های خودروساز اروپایی در معامله با ایران ترسی از ترامپ ندارند
برنامه اشکودا برای تولید خودرو ارزان قیمت در ایران
مجموعه ای از خودروهای کلاسیک
هیجان خودروسواری در بورس
با 45 میلیون تومان چه خودروهایی میتوان خرید؟+جدول قیمت
تولید چند سواری متوقف شد
سهمخواهی صنعت خودرو از «مذاکرات نفتا»
اختراع تویوتا برای دید 360 درجه رانندگان
جاده ها حذف می شوند!
تولید ملکه باتریها برای خودروهای برقی
حذف و اضافه مقررات خودرویی
وزیر جدید و چالش صادرات خودرو
تولید فیلترهای خودرو با فناوری نانو توسط محققان کشور
استرالیاییها با ته سیگار آسفالت ساختند
استفاده مرسدس-بنز از چاپ 3 بعدی برای قطعه سازی
چهارمین عامل افزایش قیمت وارداتی ها شناسایی شد
هدست واقعیت مجازی ؛کوله پشتی ویژه طراحی خودرو
راهکار جهانی انتقال فناوری در خودروسازی
چرا قرارداد تندر90 امضا نشد؟
ایران، سکوی جهش پژو شد
افزایش فروش سالانه صنعت خودرو به 28 میلیارد دلار
در این خودرو دستاندازها احساس نمیشود
MIVEC ،تکنولوژی اختصاصی خودروهای میتسوبیشی
بوگاتی هم الکتریکی خواهد شد
دولت سهمش در خودروسازیها را واگذار کند
صـــدای خوب چند؟
بررسی مشکلات مالی صنعت خودرو کشور
اعلام حجم سرمایهگذاری رنو در ایران
تولید نرم افزاری برای جلوگیری از هک شدن خودروهای هوشمند
از این پس گوگل به شما می گوید کی به دل جاده بزنید
بازگشت به ایران پژو را احیا کرد
لوکس های تایوانی در راه ایران
مظنه قیمت آمپلی فایر های خودرو در بازار
خودمختاری در اجرای مقررات خودرویی؟
ملیگرایی از تولید تا طراحی
استقبال شرکت های معتبر دنیا برای انتقال دانش فنی به ایران
سیستمی که به اسپیکر نیاز ندارد+تصاویر
سایپای امروز در مسیر بهره وری و سودآوری است
مبلغ دریافتی 50 درصد قیمت پژو 2008 نیست
توسعه صنعتی راهکار تحقق اقتصاد مقاومتی است
یک قوچ و دو روح
تبلیغات رضوانی برای "محکم ترین شاسی بلند جهان" +تصاویر
گردهمایی هوادران فراری در ایتالیا +تصاویر
چرایی تمایل نداشتن سرمایه گذاران غیرچینی و فرانسوی در صنعت خودرو
یکی از شرکتهای ایرانخودرو نماینده بنز در ایران شد
تلاش ستاد نانو برای رفع یکی از چالشهای صنعت خودروسازی
قیمت پرفروشترین سیستم صوتی و تصویری خودرو +جدول
خودروهای گازسوز بازار چند؟ +جدول
سایه سنگین بهرههای بانکی بر صنعت خودروسازی
مراکز تولید خودروی ایران را بشناسید
سایپا جزو ده بنگاه اقتصادی منتخب برای اجرای چرخه بهبود بهره وری است
وزیر صنعت دولت دوازدهم از تصمیمات لحظهای خودداری کند
آزمون بزرگ قطعهسازان در پسابرجام
حرکت خودرو بر مدار افزایش تولید
بازار پر فراز و فرود خودروی داخلی
مدل مذاکرات با خودروسازان خارجی باید تغییر کند
جایگاه ایران در آینده بازار جهانی خودرو کجاست؟
سهم خودرو از اشتغال صنعت به 12 درصد میرسد
خودرو مسابقهای ب ام و رونمایی شد +تصاویر
پیشبینی آینده صنعت خودروی جهان در 2020
معایب و مزایای ادغام برای صنعت خودرو
سهم 2 درصدی ایران از تولید خودرو جهان
اپلیکیشنی که خودروها را شناسایی میکند
امکاناتی برای خاص بودن!
هدایت آرسی از طریق ذهن
دستگاه فروش خودکار 47 متری ماشین های لوکس در کشور سنگاپور افتتاح شد
در سواریسازان چه میگذرد؟
هیوندای kona در پرتغال دیده شد
شرکت فورد 10 درصد نیروی انسانی اش را اخراج می کند
تایلند هدف جدید صادارتی خودروهای چینی
استقبال صنعت خودروسازی آلمان از پیروزی ماکرون در انتخابات فرانسه
ب ام و X5 در چین تولید میشود
دولت در جاده شکلگیری خودروساز سوم
جان برجام و جان خودروسازی
برنامه راهبردی صنعت خودرو منتشر شد
صنعت به تکنولوژی روز دنیا تجهیز شود
ربات، خطری که جان صنعت خودرو را تهدید میکند
رشد 39 درصدی تولید خودرو در کشور
شورای رقابت دست خودورسازان را باز بگذارد ملاحظه مردم را میکنیم
خودروسازان ملزم به رعایت حقوق مصرفکنندگان هستند
خط تولید مینی بوس ایرانی افتتاح شد
امسال تولیدات ملی در زمینههای مختلف افزایش مییابد
افتتاح خط تولید سمند در سمنان
آسهای هفتگانه جیپ
صنعت خودرو خودکفا شود
بیشفعالی از نوع خودرویی
بازی تغییر میکند
رنگینکمان دهرنگ سال 1395
هدفگذاری تولید 1.5میلیون خودرو در سال 96
از جعبه تا قوس
تاکسیهایی که روی آب حرکت میکنند +عکس
رو به پایین!
عجیب ترین سبک انتقال
پاکسازی هوا با بیلبوردهای تبلیغاتی!
صنعت خودرو رقابتی شود
کمپانی BMW رسما به رقابت های فرمول E پیوست
رشد فروش جهانی اشکودا در ماه فوریه
علاقمندی خودروساز اسپانیایی برای ورود به بازار ایران
رتبه نخست رشد تولید خودرو در جهان به ایران رسید
نکاتی برای انتخاب بهتر در بازار خودرو
امضای قرارداد طراحی و تولید پلتفرم خودرو
سهم ٢٥ درصدی خودرو از رشد صنعت
برنامه وزارت صنعت در حوزه واردات خودرو
واردات خودرو با رعایت ضوابط آزاد است
تکنولوژی کلید شکوفایی اقتصادی است
راز بقای خودروهای قدیمی
طرح توسعه شرکت یدکی موتور ایران در ساوه افتتاح شد
هپکو مشکلات پیچیده ای دارد
صنعت خودروسازی حال خوبی ندارد
صنایع خودروسازی کشور امسال رشد 40 درصدی داشته است
اثر آرام برجام روی صنعت خودرو
ایران دهمین مونتاژکار رنو در جهان شناخته شد
پیشبینی سهم 4درصدی خودرو در تولید ناخالص داخلی
سرشناسترین میهمانان همایش بینالمللی خودرو
شناسایی سود و رشد ارزش پرتفوی در سبد دی ماه "خبهمن"
محدودسازی واردات خودرو در ایران و آمریکا
تابوهایی که در صنعت خودرو شکست
خودروهای لوکس با فناوری سریع تر و سبک تر می شوند
تاثیر بازار ایران برافزایش فروش پژو
صوت همـــراه رانندگـــی
فنر تولید خودرو پرید
افزایش ورود قطعات منفصله به کشور
کدام خودرو امسال بیشتر تولید شد؟
ایران تا 10 سال دیگر باید اول شود
مثلث رشد قیمت در بازار خودرو
دلیلی برای دولتی ماندن 20 درصد سهام خودروسازان وجود ندارد
شمارش معکوس برای ورود اولین خودرو سانگ یانگ به ایران
نقشه راه صنعت جهانی خودرو دست کیست؟
عبور سرمایهگذاران خارجی از دالان بلاتکلیفی
تصاویری از طولانی ترین خودروی جهان
اتومبیلهای جدید تابلوهای راهنمایی-رانندگی را میخوانند
نکاتی برای انتخاب راحتتر خودرو
رقابت جهانی با استراتژی جایگزینی واردات؟
توسعه توانمندی های صنعت خودرو با مشارکت خارجی
خودروهایی که به تازگی ستاره ایمنی اخذ کردند +عکس
کاهش بازدهی خودرویی ها
تغییر مسیر آینده خودروسازی
آورده نقدی خارجی ها تضمین اجرای قرادادها است
صفر تا صد فولکس واگن
سهمونقش قطعهسازان در قرارداد پژو
مدیران سیاسی در چابک سازی صنعت خودرو موفق نبودند
چرخش خودروسازان از بانک به بورس
مسیر پلتفرم ملی در قراردادهای خارجی
عملکرد پژو و رنو در دوران تحریم معیار نیست
فروش رنو فرانسه به ایران از 80 هزار دستگاه گذشت
رای ایالت خودروسازان چگونه به حساب ترامپ رفت
رکورد قیمت خودرو در آستانه شکسته شدن
برنامه ترامپ برای پیمان نفتا و اثر آن روی جهانیسازی صنعت خودرو
جادوی تمامنشدنی
ترامپ و کارخانه خودروسازی
عمر کوتاه قراردادهای خودرویی
پیشرفته ترین خودروهای سال 2017 +عکس
عطشی بیپایان در بازار متراکم
ترامپ پشت فرمان قراردادهای خودرویی ایران
خودروهای ایرانی پشت ترافیک نشانهای جهانی
کدها جای سوئیچ را میگیرند
کلیدهای انتخاب در بازار خودرو
رشد 10 درصدی بازار خودرو در روسیه
١٤ عامل گرانی خودروهای خارجی در ایران
-
سمت مدیریتی جدید مدیرعامل نیسان در میتسوبیشی
رضایت مشتریان مهر تایید کیفیت خودرو
هوندا نسل جدید سیویک Si را معرفی میکند
هتل مجلل که روی چهار چرخ قرار دارد+تصاویر
سخنان معظمی مبهم است، کره ای ها حضور فعال در ایران داشته و دارند
توسعه صنعت خودرو به دست تدبیر
این پیادهرو شارژ میشود
خودروهایی از آینده
شارژرهای بیسیم در خدمت زمان
کلیدهای انتخاب در بازار خودرو
ممانعت خودروسازان داخلی از تولید خودروهای ارزان خارجی
کم هزینه و پرهزینهترین خودروهای جهان +جدول
سایپا و سیتروئن به سرعت اهداف خود را محقق خواهند کرد
تصمیمی بر کاهش هزینه تولید خودرو
آینده سفید خودروسازی در قاره سیاه
حضور هیات عالی رتبه پژو سیتروئن در سایپا کاشان
چرا مدیران ایرانخودرو و سایپا در مراسم عقد تفاهمنامه رنو حاضر نبودند؟
نقشه دیجیتالی امکان یافتن پارکینگ را برای رانندگان فراهم می کند
توقف تولید گلف فولکس واگن در پی مشکلات فنی
5 محصول جدید پژو به ایران میآیند
چند نفر چرخهای خودروسازی دنیا را میچرخانند؟
اپلیکیشنی برای جا نماندن از اتوبوس و مترو
موقعیت خودرو در مذاکرات خارجی
دوستی خودروها با هم
آیا شیشه های بنز و ب ام و جلوی ابتلا به سرطان را می گیرند؟
رونمایی از برنامه پژو در ایران
انجمن قطعهسازان خودرویی شد
همکاری خودرویی با ایران توافق برد- برد است
تنفس مصنوعی برای بازگشت خودروییها به مدار
تمدید انحصار در بازار خودرو
قراردادهای فرعی سایپا – سیترون مشابه ایران خودرو - پژو است
نجات صنعت خودرو با برجام
جای خالی پوشش ریسکهای خاص بیمه در صنعت خودروسازی
بسیاری از تحریم ها به قانون و رویه در سایر کشورها تبدیل شده است
چه عواملی باعث استهلاک خودرو میشوند؟
فــرمانــروایان کوچک
دورهمی خاصترین خودروهای دنیا+ عکس
فروش 2 برابری لامبورگینی با ورود شاسی بلند جدید
رونمایی «هوندا» از «سیویک هاچبک 2017» +عکس
خودروهای هوشمند و خودران چگونه هدایت میشوند؟
آمادهسازی ایستگاه فضایی بینالمللی برای ورود تاکسیهای فضایی
رونمایی از اولین سیستم صوتی هوشمند سونی برای خودرو سازگار با اندروید و آیاواس
باتری با قدرت شارژ دو برابر در راه است
تفاوت در مسیر مشارکت
چرا خودروهای آلمانی پرخرج و خودروهای ژاپنی کمهزینهاند؟
تولید مجدد خودروهای سنگین دستاورد برجام است
رقابت المپیکی خودروسازان
کومهو برنده مسابقات بینالمللی طراحی تایر شد
ساخت نانوپوششهای ضد حریق با کاربرد در صنایع هوافضا و خودروسازی
روبات خودروسازی با خطای کمتر از 100 میکرومتر
10 ماشین سفارشی غولهای بزرگ طراحی
خودروسازی، صنعت و کشاورزی محور توافق در مسکو
سودآوری رنو رکورد زد
آمار فروش فیات کرایسلر بازبینی میشود
چرا تجاریسازان منبع زیان انباشتهاند؟
چالش عصرجدید خودروسازی ایران
ولوو تا 2021 خودروی خودران میسازد
دافعه و جاذبه سرمایهگذاری خارجی
وضعیت مالی صنعت خودرو با کاهش نرخ سود بانکی بهبود مییابد
وضعیت صنعت خودرو در کمیسیون صنایع مجلس بررسی شد
سکوت در قبال مصوبه ستاد اقتصادی دولت
بهترین نوع استراتژی همکاری با خارجیها
قطعه سازان ایران توانایی تولید 70 درصد نیازهای خودروسازان را دارند
اتفاق مثبتی در حوزه کیفیت صورت نگرفته است
فروش رنو به ایران 3.5 برابر شد
کارکنان هیوندای به اعتصاب میروند
نارضایتی نعمتزاده از خودروسازان
افتتاح خط تولید باطریهای پیشرفته خودرویی
8 قرارداد ؛ ارمغان «برجام» در صنعت خودرو
عرضه خودروی خودران برقی چینی
مذاکرات دو خودرو ساز بخش خصوصی با ایتالیا، کره و آلمان
عرضه پراید در بورس نیازمند اظهارنظر حقوقی
خرید فولاد خودروسازان آلمانی دردسرساز شد
چند دقیقه داخل مدل جدید شاسی بلند MVM
دو سنگ بزرگ قراردادهای خارجی صنعت خودرو
ایران چهاردهمین خودروساز بزرگ جهان معرفی شد
تویوتا پتنت خودرو پرنده را به ثبت رساند
گرانترین خودروی تاریخ را ببینید+تصاویر
پیام مدیر عامل گروه خودرو سازی سایپا به مناسبت روز صنعت
خروج بریتانیا از اتحادیه اروپا موجب کاهش فروش خودروسازان خواهد شد
پایان عصر حاکمیت دولت بر خودرو
سهم 35 درصدی خودرویی ها از معاملات هفته گذشته بورس
اتفاقی مثبت در واگذاری خودرویی
لاکچری بازها کدام سیستم را می پسندند؟
8 استان خودروساز ایران کدامند؟
ضرورت ایجاد مراکز تحقیق و توسعه خودرو
صنعت خودرو از برنامه راهبردی جا ماند
باید با هوشیاری وارد عرصه سرمایه گذاری صنعت خودرو شد
دست عربها از بازار خودرو ایران کوتاه شد
نفع خودروسازان از کاهش سود سپردههای بانکی؟
از سوپر ماشینهای بدون راننده تا خودروهایی با ظاهری خاص
بند نانوشته در قراردادهای صنعت خودرو
در سواریسازان چه میگذرد؟
مشکل صنعت خودرو قیمتگذاری نیست؛ کیفیت است
ارتقای کیفیت و ایجاد رقابت با آزادسازی قیمت خودرو
بنز با چرم کروکودیل و طلای 24 عیار
فراری F12 برلینتا زیر تیغ جراحی نوویتک روسو
کاهش دخالت پلیس در صنعت خودرو
هیاتهای حل اختلاف خودرویی تشکیل میشود
کابین اتومبیل خود را آکوستیک کنید
مردم دنیا عاشق این خودروها هستند
نفت ارزان به بازارخودروهای شاسی بلند رونق داد
الفبای استقلال قطعهسازی از صنعت خودرو
گوگل اندروید اتو را بروز کرد
در تولید رنگ برلیانس به خودکفایی رسیدیم
سناریوی افزایش قیمت خودرو کلید خورد
FNR، شبح جدید جنرال موتورز
تجاری از کلاس اسپرت
رونمایی از خودروی خودران اوبر در خیابانهای آمریکا
کامیون های روباتیکی وارد جاده ها می شوند
چرخ فیبر کربنی برای ابرخودروها
کاهش 100 تا 500 هزار تومانی قیمت 8 خودرو
اشتغال 300 هزار نفری در صنعت قطعه سازی
ورود به دریاچه یخبندان به دلیل اعتماد به نویگیشن خودرو!
24 درصد قیمت خودرو به دولت میرسد
استفاده از تفاله قهوه به جای آسفالت
خودروهای بدون راننده در راه جادهها
سفر جادویی با سرعت 1000 کیلومتر بر ساعت!
راهاندازی سیستم تحویل کالا به خودرو بدون نیاز به حضور راننده
-
خودروهای 9 کشور اروپایی در نمایشگاه اصفهان به نمایش درمی آید
جزئیات دومین قرارداد خارجی صنعت خودرو ایران
گزارش تصویری از ادامه فعالیت اتومکانیکای دوبی
تویوتا اولین باتری منیزیمی را ساخت
گشت و گذار تصویری در روز دوم اتومکانیکای دوبی
گزارش تصویری از اولین روز آغاز به کار اتومکانیکای دوبی
شگرد کرهایها برای حضور در بازار خودرو ایران
جاده لغزنده سهامداری خارجی در خودروسازی ایران
اصلاح ساختار مالی سایپا نتیجه مدیریت اثر بخش است
کاهش 32 درصدی سود خالص بنز
رشد 7 برابری مونتاژ محصولات رنو در ایران پس از برجام
فولکس به هر قربانی رسوایی تقلب 5 هزار دلار می پردازد
تویوتا در تدارک از سرگیری تولید در مناطق زلزله زده است
پیش فروش خودرو بدون مجوز ممنوع است
دستانداز جدید عراق برای خودروسازان ایرانی
بسته ضدرکود دیگری در راه است؟
گامهایی برای پایان تصدیگری دولت؟
سهم یک درصدی ایران از خودروسازی جهان
باشکوهترین بازگشت خودروها
منتظر اطلاعات تورمی سال ٩٥ هستیم
325 هزار دستگاه تسلا مدل 3 پیش فروش شدند
در انتخاب بین دو خودرو مانده اید؟
پژو مجوز رسمی سرمایه گذاری در ایران را گرفت
دولت باید از صنعت خودرو حمایت کند؛ نه از صنعتـگر
برنامه امسال خودرو دستیابی به 84 درصد تولید سال 90
خودروهای برقی به صورت وایرلس شارژ میشوند
توسعه یک آلیاژ سبک و کم هزینه برای بهبود مصرف سوخت خودرو
تویوتا و مایکروسافت شریک شدند
الزامی شدن یک فناوری جدید در خودروهای اتحادیه اروپا
ضرورت تحقق اقتصاد مقاومتی در صنعت خودرو
سناریوهای خودروسازی 95
آیا تاپ گی یر بدون کلارکسون موفق می شود؟
زیباترین چراغ های جلو صنعت خودرو
ساخت نسل جدیدی از چراغ قوه به قدرت چراغ خودرو
واردات 51 هزار خودرو سواری
دو ضرورت صنعت خودرو در سال جدید
آغاز خواب بهاری بازار خودرو
با اقتصاد مقاومتی صنعت خودرو اصلاح میشود
توجه ویژه وزارت صنعت به بخش تولید در سال 95
راهکار تحقق اقتصاد مقاومتی در صنعت خودرو
خودروهای پارسال،آینده سازان امسال به روایت تصویر
پلتفرم تعاملی جدید آلمانها برای ماشینهای پلیس در نمایشگاهCeBIT 2016
به قانون خودرو تیرخلاص زدند
عرضه نسخه اولیه جویشگر نقشه در نیمه اول 95
ابداع فناوری جدید برای تبدیل خودروها به سالن نمایش فیلم سینمایی
تویوتا پوشیدنی جدیدی برای جابجایی نابینایان می سازد
فناوری بیسیم، ارتباط خودروها و جذب انرژی خورشید از بدنه
تجهیز 90 درصد خودروها به اینترنت
امکانسنجی چهار فرمان خودرویی رئیسجمهوری
چین با خودروهای سیار آزمایشگاهی به جنگ ایدز رفت
روحانی، میهمان ویژه همایش خودرو ایران
تعیین مسیرسرمایهگذاری خارجی
توقف امکانات خودروی هوشمند نیسان برای جلوگیری از نفوذ هکرها
تجهیز خودروها به فناوری «تلماتیک»
مقرونبهصرفهترین خودروهای سال 2016
آیین نامه قانون حمایت از حقوق مصرف کنندگان خودرو، روی میز هیات دولت
مطالبات کیفی وقیمتی از خودروسازان
سوبارو تصویری از کانسپت آتی خود منتشر کرد
قول وزیر به سرمایهگذاران خارجی
تحقق 65 درصد برنامه های گروه سایپا تا پایان سال
طراحی آینههای هوشمند نمایش دهنده ترافیک، اخبار و آب و هوا
وقتی هابلوت و فراری ساعت می سازند
ردیابی انتقال فناوری در قراردادهای خودرویی
تمرکز بر طراحی و توسعه محصول در خودرو
گمانهزنی از جزئیات قرارداد پژو
همایش صنعت خودرو نقطه ی عطفی برای حضور سرمایه گذاران خارجی است
در این جاده دیگر لیز نمی خورید
چالش حمایتهای دولتی از صنعت خودرو در پساتحریم
خودرو چند بعدی در ژاپن
حرکت موتورسیکلت های کاربراتوری به سمت تکنولوژی انژکتوری
چطور آفلاین از نقشه گوگل استفاده کنید؟
ساخت موتورسیکلت با قابلیت تبدیل به جت اسکی
خداحافظی با آینه خودروها
استفاده همزمان اطلاعات و سرگرمی در خودرو
30 درصد رشد اقتصادی مدیون «خودرو»
تقویت صنعت خودرو با حضور خارجیها
ورود خودروییها به بازار ICT
زنجیر چرخ لاستیکی در مرکز رشد دانشگاه آزاد همدان رونمایی شد
بهترین فناوری خودرو: Chevy Bolt EV
سالهای طلایی از دست رفت
لذت رانندگی در حالت بی وزنی
نخستین ابررایانه هوش مصنوعی داخل خودرو جهان معرفی شد
رمزگشایی از افت سهم ارزش افزوده خودرو
چشمانداز صنعت خودرو در 2016
ده خودرو مناسب برای فصل زمستان
اتصال خودرو و گوشی هوشمند با نمایشگر «وینت»
فیلترهای نانویی خودرو با قابلیت بهبود عملکرد موتور
فناوریهای خاص در خودروهای فردا
افزایش تعداد مراجعان به اینترنت هنگام رانندگی با خودرو
-
12 تکنولوژی شگفت انگیز در خودروها
یک ماهه خودرو بدون سرنشین بهتر از تسلا ساختم
پیشرفته ترین سیستم تعلیقی خودرو توسط مخترع ایرانی ثبت بین المللی شد
رونمایی از نخستین خودرو کنترل ذهنی در چین
سهمیه ثابت برزیل در میان 10 خودروساز برتر جهان
خودرویی که با مغز کار می کند
تمایل تولیدکنندگان تراشههای الکترونیکی را به سوی خودروسازان
وقتی شیشههای جلوی اتومبیل هوشمند میشود
فروش نقشه نوکیا به خودروسازان آلمانی نهایی شد
ابداع فناوری جدید برای برقراری ارتباط میان خودروهای هوشمند و عابران پیاده
سرعت خود را در هنگام حرکت بسنجید
استفاده از نانو ابرخازن در خودروهای بدون سرنشین
نسل جدید چراغهای هوشمند خودرو
روشن کردن خودرو با موبایل
وزارت صنعت بهدنبال تسهیلات جدید خودرو
این ماشین خیابانها را سنگفرش میکند
ساخت جتپک سبک با کارایی بهتر
آپشن تثبیت سرعت خودرو در مسیرهای طولانی ساخته شد
صندلی خودرویی که نوار قلب میگیرد
خودروهای دیزلی خارجی را سختگیرانه تست می کنیم
شوفر رباتی هم به بازار آمد
تولید اتومبیل 53 هزار دلاری با استفاده از چاپگر سه بعدی
روباتی که رقیب پیکهای موتوری میشود
رونمایی از باتریهای پرقدرت جدید برای خودروهای برقی
نسبت کاهش نرخ تورم با قیمت خودرو
تولیدکنندگان ایرانی در پساتحریم راهی جز ارتقاء کیفیت ندارند
تسهیلات 25 میلیونی، منجی تولید میشود؟
تاکسیهای پرنده؛ رویایی که به واقعیت تبدیل میشود
امکان ردیابی خودرو به صورت آنلاین
استفاده از فرامین صوتی در خودرو موجب حواس پرتی رانندگان می شود
احتمال جریمه 100 هزار دلاری هکرها
تصمیم سرنوشت ساز در پساتحریم
خودرو خورشیدی غزال ایرانی مجوز ورود به مسابقات جهانی گرفت
این خودرو باند فرود پهپاد دارد
وسیله عجیب به نام تراکتور سیکلت
صدای بوق خودروهای ناپدید شونده میآید!
تولید چتر تغییر شکل دهنده با الهام از سیستم تعلیق خودرو
نیسانی که سلفی میگیرد
پیدا کردن جای خالی پارک خودرو به کمک اینترنت
هکرها، دغدغه جدید صنعت خودرو
ساخت سیستم هشداردهنده انحراف از مسیر به سایر رانندگان
کنترل خودرو با ساعت هوشمند
راه اندازی اولین کارواش خودرو همراه با فن آوری نانو در کنگاور
ابتکار عمل اینتل برای مقابله با هک کردن خودروها
دو فرانسوی جدید میهمان ایران خودرو و سایپا
خودرو عنکبوتی که از شیب 70 درصد هم بالا میرود
لیزر میتواند خودروهای هوشمند را از کار بیندازد
ناسا به دنبال ساخت پرتوی کششی با فناوری خودرو فراصوت
رونمایی از نخستین خودرو فراصوت جهان
خودرویی که تغییر شکل میدهد
نانوژنراتوری برای تولید انرژی از اصطکاک لاستیک خودرو
سامسونگ برترین شرکت فناوری در زمینه پتنت خودرو
استخدام دو هکر خودرو در شرکت تاکسی یاب اوبر
تبدیل خودرو عادی به خودرو هوشمند با اکسپلوراید
بی علاقگی رانندگان به استفاده از امکانات فناوری خودروها
پیادهروی پرهیجان با کفشهای بالهدار اسکیت
کلاهی که ضربه وارده به سر را شناسایی میکند
ربات حمل و نقل قطعات برای کاربری در صنایع مختلف طراحی شد
سلول های خورشیدی با کاربرد در صنعت خودرو ساخته شد
سریعترین خودرو مسابقاتی خورشیدی
صنعت خودرو روسیه در بحران
ساخت خودرو رکابی مجهز به پوسته محافظ کاربر
مایکروسافت با این نرمافزار اخبار را حین رانندگی برایتان میخواند
نسخه آلمانی – ژاپنی برای خودروسازی ایران
نخستین خودرو کیفی جهان طراحی شد
واک کار، وسیله نقلیهای بهتر از هاوربرد لکسوس؟!
خودرویی با حجم یک کوله پشتی!
این خودرو در کیف جا می گیرد
چرا خودروسازها به نقشههای نوکیا سه میلیارد دلار پول دادند؟
امتیازگیری از خودروسازان خارجی
محققان چینی برای کنترل خودرو از امواج مغزی استفاده کردند
رادیوی خودرو هکپذیر زیر ذرهبین رفت
نانوتورنادو، ماشین پرنده بدون پره
ابداع فناوری «حفاظت هوشمند» برای درب خودروها
قرارداد تولید موتور نسل جدید همسو با محیط زیست امضا شد
هک کردن خودرو در حال حرکت خودروسازان را شوکه کرد
ساخت جادههای پلاستیکی در هلند
رانندگی در دنیای مجازی سهبعدی با هدست فناورانه
با سیستم EYES هرچه جلو ماشین مقابل هست را ببینید!
تولید خودرو با فناوری چاپ سه بعدی در کارخانه های فشرده
تهیه آب آشامیدنی سالم با استفاده از نمک و باتری خودرو
امکان اتصال پرداخت الکترونیکی به خودرو فراهم شد
ساخت فرمان هوشمند برای تشخیص خواب آلودگی راننده
کاهش آلودگی صوتی و تولید انرژی پاک با موانع رنگی
تولید شورولتهای جدید با سیستم خنککننده موبایل
تولید انرژی خورشیدی با موانع صوتی بزرگراهها
نانو ژنراتوری که اصطکاک چرخش لاستیک های خودرو را به انرژی تبدیل می کند
موفقیت فناوران کشور در ساخت دستگاه کاهش آلایندگی موتورهای بنزینی
ساخت نخستین خودرو پرسرعت با چاپگر سه بعدی
اتومبیل فوق حفاظت، قدرت یا ترس!
10 فناوری نوآورانه در جدیدترین خودروها
ادغام غولهای بزرگ خودروساز در راه است
ساخت هشدار دهنده خستگی و حواس پرتی برای رانندگان در دانشگاه تبریز
با ویلچر از پله ها بالا بروید
گوشی های هوشمند بلای جان رانندگان
سیستمهای خواب به خواب نرفتن در جاده
روغن خوراکی به سوخت پاک تبدیل میشود
تامین نیروی خودرو با انرژی بخار آب و هاگ
خودرو 36 میلیون تومانی
فناوری جالب برای کامیون ها
با این وسیله جالب و شگفتانگیز برای یافتن خودرو پارک شده اذیت نمی شوید
تجهیز 77 میلیون خودرو به سیستمهای گوگل و اپل
دوگانهسوزها در مسیر رشد تولید
موانع رشد کیفی تولید خودرو
آینده مبهم خودرو در رشد اقتصادی
خودرو را با تلفن همراه هدایت کنید
صنعت خودرو امیدوار به روزهای پس از تحریم
اثر تحریم های بین المللی بر صنعت خودرو 30 تا 40 درصد است
انتظارات مشتریان خودرو براورده نمی شود
تحریم همه مسائل و مشکلات صنعت خودرو نیست
نسل بعدی خودروهای ایرانی از دانشگاه می آیند!
مهمترین خواسته مردم از خودروسازان کیفیت و ایمنی است
نگاه سرمایهگذاران جهانی به بازارخودرو ایران متمرکز شده
گسترش سهم دانش و فناوری در صنعت خودرو
چهارمین نشست تخصصی خودرو برگزار شد
چاله های خیابانی دیگر دردسر رانندگان نخواهند بود
صنعت خودرو و 2 چالش رقابت با خارجی ها و واردات فله ای
-
کیفیت خودروهای داخلی افزایش مییابد؟!
لزوم تغییر ساختار مالی صنایع خودروسازی
تولید نانوساختار متخلخل در خودروسازی
احساسی شبیه لامبورگینی
جزئیات ابلاغیه کیفیسازی خودروها
سند خودروسازی « مایوان» در اردبیل تحویل نمیشود
اهداف کیفی صنعت خودرو تعیین شد
نصب سیستم جلوگیری از برخورد در خودروهای سبک
مدیرعامل سابق سایپا مشاور نعمتزاده در صنعت خودرو شد
منتقدان دیروز خودرو ملی؛ مدافعان امروز مونتاژ
رشد 17 درصدی تولید خودرو
پیشنهاد منطقی برای شراکت با خودروسازان خارجی
ساخت حسگری برای توقف خودرو رانندگان مست
جزئیات سنگاندازی پژو در داخلیسازی قطعات
سرعت گیر جاده مخصوصی ها برای مدیر جدید
خودروسازان ایرانی از ناحیه تعطیلات چقدر زیان می کنند
راه حل تازه فناوری اطلاعات برای یافتن جای پارک خودرو
بررسی صنعت "خودرو" در برنامه امشب "بورس
تولید موتور دیزل ایرانی در پردهای از ابهام
طراحی نسل جدید ساعت مچی با الگوبرداری از خودروهای اسپرت
استاندارد آموزش شغل « ماکت ساز خودرو » در خراسان شمالی تهیه و تدوین شد
صنعت خودروسازی عزمی بر استفاده از توان دانشگاهها ندارد
لهستان خودرو مسابقه ای تولید می کند
جلوگیری از رانندگی در زمان مستی با حسگر جدید
استفاده از فناوری هوشمند آندروید اوتو در خودروها برای نخستین بار
اطلاعات حمل و نقل عمومی شهرها به نقشههای آیفون اضافه میشود
موضع ترکها درباره همکاری خودرویی ایران و آمریکا
چشمانداز تولید خودرو تا سال 96
تحریمها مانع ساخت آزمایشگاه خودروسازی شد
کاهش هزینه های تمام شده تولید و ارتقاء کیفیت خودرو با نرخ سود بانکی پایین
نقشههای اپل بهروز میشود
ضمانت رنگ خودروها سه ساله میشود
داخلیسازی، دستاورد ادغام خودروسازان
اعتصاب در سومین کارخانه خودروسازی ترکیه
آیا قیمت و کیفیت خودروهای ایرانی باهم تناسب دارند؟
25 درصد کل ظرفیت تولید خودرو کشور در ارگ جدید
مذاکره برای ثبات قیمت خودرو
الزامات سرمایه گذاری خودروسازان ژاپنی در ایران
تولید خودرو در ایرانخودرو 85 درصد افزایش یافت
جدیدترین وضعیت تولید در سواریسازان داخلی
سهم 10 درصدی خراسان رضوی در صنعت خودروسازی کشور
افزایش 20 درصدی تولید خودرو در سال 94
رکود بازار هیاهویی بیش نیست
توقف واگذاری ماشینسازی تبریز تا اطلاع ثانوی
رابطه ماتریکسی بانک ها و خودروسازان عامل افزایش مطالبات معوق بانکی
با افزایش کیفیت خودرو تولید داخل می توان برای صادرات گام برداشت
جهتگیری همکاری خودرویی ایران با کشورهای اروپایی
اعلام آمادگی نیسان برای همکاری با ایران
مشکلات توسعه شرکت خودروسازی فردا در سمنان بررسی شد
خودروهای تاشو در راهند
2 شرط مجلس برای خودروسازان فرانسوی
پیشنهاد سه میلیاردی «ابر» برای خرید خدمات نقشه نوکیا
3 پیشنهاد شورای رقابت برای جلوگیری از افزایش قیمت خودرو
ثبت رکورد تولید خودرو در مکزیک
برنامههای نرمافزاری کنترل خودرو برای فراموشکاران و والدین نگران
کیفیت باید در زنجیره های ارزش تولید خودرو ارتقاء یابد
تلاش دولت روسیه برای حفظ صنعت خودرو
وظیفه خودروسازان خرید باشگاه ورزشی نیست
عقد قرارداد با خودروسازان جهانی به شرط انتقال تکنولوژی باشد
باز کردن قفل خودرو با ساعت اپل ممکن شد
سهامداران تولید محور خودرو به مجمع سالانه دعوت شدند
پیشنهاد تشکیل کمیته مشترک خودروسازان و قطعهسازان
تمایل الجزایر برای سرمایهگذاری مشترک با ایران در خودروسازی
ورود وزارت صنعت به قرارداد خودروسازان با قطعهسازان
پدال هوشمندی که به تعیقب سارقان میرود
سامانه هشدار زودهنگام خواب آلودگی راننده ساخته شد
تولید سالانه سه میلیون دستگاه خودرو در دستور کار قرار دارد
استفاده از نانوکامپوزیت کربنی در شیشه و داشبورد خودرو
تولیدات خودروسازی ارگ جدید در سال جاری 2 برابر میشود
ورود 1000 خودرو جدید به تهران در هر شبانه روز
افتخار آفرینی یک مدیر توانمند ایرانی در ایتالیا
اتومبیل خاص ژاپنی در ایـران!
پرقدرتترین و کوچکترین بولدوزر جهان
تولید سوخت از آب و دی اکسید کربن
تاکسی که در آسمان پرواز میکند
همکاری با خودروسازان معروف از رویا تا واقعیت
کاهش وابستگی خودروسازان به بانکها؛چگونه؟
خودرو سازان داخلی وارد چرخه نوآوری و فناوری شوند
سوال خودرویی از نعمتزاده به صحن علنی مجلس ارسال شد
علاقه خودروسازان خارجی به بازار خودروهای کارکرده
انقلاب فناوری در بزرگترین بازار خودرو جهان
همکاری ایران و ایتالیا در صنعت خودرو
افزایش قیمت خودرو بعد از توافق!
فناوری خودرو وارد یخچال سوپرمارکتها شد
سیستم مسدود کننده تلفن همراه در داخل خودرو طراحی شد
موافقت باورودخودروسازان آمریکایی
دستبند مایکروسافت با امکانات ویژه برای دوچرخهسواران
ابداع فناوری ارتباطی خودرو توسط اچتیسی
بهترین شاخص پیشرفت صنعت خودرو، رضایت مشتری است
رونمایی از عینک شگفتانگیز BMW
ابداع فناوری جدیدی که حرکات اشتباه راننده را هشدار می دهد
ساخت و طراحی سیستم تخلیه آب موتور و رادیاتور


Controversial Vehicle Price Surge in Iran
IKCO management handed over to consortium of non-governmental shareholders
Iran's government approved car import after four years
$2 Billion Aid Package to Bolster Automotive Industry
Renault sales decline 6.7% in first half of 2019
FIAT cars will be manufactured in Salafchegan, Iran
Car, mobile price fluctuations in Iran puzzling people
IKCO, Azad University Sign R&D Agreement
When will Azerbaijan start producing Peugeot 207?
Iran Annual Auto Output Report: 2018-19
Automotive Industry has exceeded the targets with “Automechanika Istanbul” which the World's 3rd Largest Fair!
Sout Korea’s auto exports down 1.6% in Feb.
Renault to Return to Iran: Deputy Minister
Chery's luxury brand will soon be on the market
Warm start for arrizo6 in Ahwaz


